Archiwum. Automatyzacja realna czyli nieznana. 2 Symulacja
Umiejętność efektywnego ( a w tym praktycznego ) zastosowania wiedzy wydaje się być monopolem Zachodu trudnym do złamania.
Podział pracy ma długą historię. Mimo braku definicji w polskim systemie mamy pracowników fizycznych i umysłowych. Urzędnicy są biologicznymi komputerami działającymi według algorytmów z ustaw, rozporządzeń i regulaminów.
Początkowo komputery miały mało pamięci i były powolne czyli były słabe. Siłą rzeczy programy dla nich były proste choć wobec prymitywizmu procesu programowania wykonanie ich było uciążliwe.
Moc komputerów rosła i dalej rośnie podobnie jak złożoność programów. Gdy seria złożonych wyspecjalizowanych systemów komputerowych jest krótka na zachodzie koszt programu przekracza 95% całości kosztów systemu.
Wbudowany w urządzenie mikrokontroler musi mieć program. Mikrokontroler z programem do odbiornika TVC ( w miarę określony jest zestaw układów scalonych w TVC ) kosztuje circa 3 razy tyle ile zlecona produkcja tego mikrokontrolera z ( opracowanym i dostarczonym ) programem w jego ROM-ie. Zatem koncern powołuje zespół inżynierów – programistów do wykonania programu i zleca wykonanie masek z tym programem w ROM i wyprodukowanie długiej serii mikrokontrolerów. Program musi być bardzo starannie przetestowany co jest drogie. Programu z pamięci ROM mikrokontrolera nie można przeczytać i go ukraść.
Z kolei producent odbiornika TVC kupując mikrokontroler z programem nie musi ponosić nakładów na wykonanie programu.
Tak jest z wieloma wbudowanymi mikrokontrolerami.
Zatem myśl ludzka ma tu całkiem sporą cenę.
Podjęcie produkcji prostych mikrokontrolerów do kalkulatorów spowodowało nad-konkurencję i drastyczny- spektakularny spadek cen chipów i kalkulatorów ! Dla CEMI tanio kupiono zestaw masek do produkcji chipów kalkulatorów od jednego z producentów, który wycofał się z interesu.
Używana do tego celu technologia PMOS jest w mikroelektronice najprostsza ze wszystkich !
Ceny mikroelektroniki będą spadać dekadami i coraz ważniejsze będzie oprogramowanie ! W miarę komplikacji programów bardzo trudne i drogie stanie się testowanie urządzeń z wbudowanymi mikrokomputerami.
Symulacja mająca zastosowanie w każdej dziedzinie nauki i techniki polega na naśladowaniu zachowań zjawisk lub obiektów za pomocą ich modelu. Regułą jest stworzenie na początku badań modelu matematycznego ( czasem bardzo uproszczonego ) realizowanego dalej w postaci programu komputerowego lub na maszynie analogowej lub w wyspecjalizowanym urządzeniu. Modele fizyczne w mniejszej skali są dalej niezastąpione w badaniach aerodynamicznych i hydrodynamicznych.
Do analizy zjawisk skupionych mają zastosowanie równania różniczkowe zwyczajne a do zjawisk rozłożonych równania różniczkowe cząstkowe.
-Analiza dynamiki procesów. J.C. Friedly, WNT 1975.
Mechanizm zachowanie części obiektów regulacji daje się do analizy ubrać w zestaw równań różniczkowych zwyczajnych lub cząstkowych.
Czyste jest opóźnienie transportowe substancji taśmociągiem lub skwantowane zdarzeniami koleją lub samochodami. Ale już opóźnienie transportowe płynu rurociągiem zawiera w sobie mieszanie spowodowane nielaminarnym przepływem i wymianę ciepła z rurociągiem i otoczeniem.
Analiza własności dynamicznych obiektu służy dalszemu optymalizowaniu systemu regulacji a w tym określeniu optymalnych nastaw regulatorów oraz symulacji zachowania obiektu.
N.B. Pierwszy regulator samonastrajający się zastosowała w swoim DCS amerykańska firm Northrup Leeds w 1981 roku a za nią podążyli naśladowcy. Ale zadanie jest trudne i mimo wysiłku nadal nie ma satysfakcjonującego rozwiązania.
Program Microcap-2 (1984, Microcomputer Circuit Analysis Program ) do symulacji układów elektronicznych ( jest kompatybilny z programem SPICE2 - Simulation Program with Integrated Circuit Emphasis ) ma dla ułatwienia do symulacji przykładowe, dydaktyczne układy. Jest z tego względu dość łatwy do opanowania i w praktyce bardzo użyteczny. Możliwe że tego rodzaju programy w przyszłości zostaną wyposażone w funkcje optymalizacji. Na razie procesory komputerów PC są dużo za słabe do tego zadania.
Im bardziej skomplikowany jest system tym mniej go rozumiemy. Nadal niewiele wiemy o zachowaniu przeróżnych systemów Ziemi. Trafność prognoz pogody z modeli realizowanych na superkomputerach z danych satelitarnych i naziemnych nadal nie jest wysoka. Ziemia jest tylko drobiną w Kosmosie i o tym często zapominamy.
Dla dobrej dokładności dynamiczny model zjawisk gospodarczo – społecznych świata musi mieć około 20 tysięcy zmiennych. Śmieszne wydają się przy tym proste modele ekonometryczne, które w gruncie rzeczy niewiele wyjaśniają.
Duże znaczenie ma w gospodarce chemia a w szczególności petrochemia. Automatyzacja w zachodniej chemii zaszła całkiem daleko.
Okres po II Wojnie Światowej aż do kryzysu energetycznego 1973 roku nazywany jest już Złotą Erą Kapitalizmu. To jedyny w historii bezkryzysowy okres wysokiego i egalitarnego wzrostu i rozwoju. Wszystko wskazuje na to że wzrost ten napędzany był bardzo tanią ropą naftową. W gruncie rzeczy zachodnia gospodarka już nie wróciła na poprzednią trajektorie i rozwija się wolniej. Nic dziwnego skoro z ropy naftowej i gazu ziemnego łatwo wytwarza się ponad 20 tysięcy produktów stanowiących bazę w całym nowoczesnym przemyśle. Transport bazuje na ropie naftowej a gaz ziemny używany jest w całym przemyśle i energetyce.
W automatyce praktycznej głównie chodzi o to aby symulujący model zastosowany zamiast obiektu przemysłowego zachowywał się w pętli regulacji i systemie sterowania tak jak fizyczny obiekt lub chociaż podobnie. Zatem czas narastania odpowiedzi całej pętli i jej przeregulowanie mają być podobne jak z prawdziwym obiektem przy identycznej konfiguracji i optymalnym ustawieniu parametrów regulatorów. Natomiast samodzielna odpowiedz modelu nie musi być idealnie taka jak obiektu !
Od pewnego czasu modny jest model SISO obiektu regulacji składający się z opóźnienia i inercji I rzędu. Z właściwym regulatorem dla małych sygnałów (!) odpowiedź zależy tylko od opóźnienia. Opóźnienie to względnie łatwo symuluje się programowo natomiast jest kłopotliwe w realizacji analogowej. Stąd w analogowej realizacji modelu obiektu nie będziemy raczej stosować owego pośredniczącego modelowego opóźnienia starając się uzyskać podobne zachowanie innym modelem. Być może nawet bardziej zgodnym z obiektem niż z model z opóźnieniem i inercją
Poprawne ustawienie parametrów regulatora PID – PI okazało się zdumiewająco trudne. Ziegler Nichols opracowali (1942) eksperymentalny algorytm do strojenia regulatora ale w praktyce jest mało użyteczny lub bezużyteczny z wielu powodów.
Potrzebna była siatka pojęciowa ( „małe stałe czasowe ” to w tej narracji odpowiednik opóźnienia) do efektywnego podejścia do tematu.
C. Kessler w 1955 roku w niemieckim „Regelungstechnik” opublikował dla znanej transmitancji prostą metodę wyliczenia nastaw regulatorów nazwaną optimum modułu. Charakterystyka częstotliwościowa zamkniętego układu regulacji miała być maksymalnie płaska niczym dolnoprzepustowego filtru Butterwortha. W 1958 Kessler rozwinął idee i podał wzory dla obiektu całkującego a metodę nazwał optimum symetrii.
Niech będzie obiekt z dominująca inercją o czasie T i „małą stałą czasową Ts”. W metodzie optimum modułu Kesslera stała czasowa integratora regulatora równa jest T co powoduje przesuniecie bieguna inercji do zera. Kaskadowo połączona inercja i właściwy regulator PI dają bowiem w efekcie „integrator”. Stała czasowo tego „integratora” ( o tym decyduje wzmocnienie w pętli ) ma być dwukrotnie większa od małej stałej czasowej Ts co daje wypadkowy obiekt II rzędu o dobroci Q=0.707... i taki samym współczynniku tłumienia Beta. Gdy obiekt ma dwie duże stałe czasowe krótszą z nich należy skrócić akcją całkująca D regulatora PID.
Co jest zaletą metody Kesslera ?
-Charakterystyka zamkniętego obiektu regulacji II, III, IV rzędu jest znana jako że jest to filtr Butterwortha. Wiadomo jakie jest przeregulowanie, czas regulacji i pasmo pętli regulacji. Obiekt drugiego rzędu ma przeregulowanie 4.3% a czas regulacji dla tolerancji 5% równy 4.1Ts. Obiekt III rzędu ma odpowiednio 8% i 7Ts a obiekt czwartego rzędu 6.2% oraz 13.6Ts.

-Wszystko zależy od „małej stałej czasowej”
W polskiej literaturze metody Kesslera są przytaczane. Ale nie ani słowa wyjaśnienia o „małych stałych czasowych”. Co to jest za tajemniczy twór ?
Przykłady:
A. Współczesny tani, standardowy monolityczny wzmacniacz operacyjny ma różnicowy stopień wejściowy z tranzystorami PNP, stopień wzmocnienia napięciowego o charakterystyce częstotliwościowej zbliżonej do integratora na tranzystorach NPN i wyjściowy komplementarny wtórnik. W taniej standardowej technologii tranzystory NPN mają częstotliwość graniczną Ft około 500 MHz. Natomiast tranzystory PNP mają na tle tranzystorów NPN bardzo małą częstotliwość Ft. Odwrotność ich częstotliwości granicznej to „mała stała czasowa” ! Małosygnałowa odpowiedź tak skompensowanego wzmacniacza operacyjnego w konfiguracji o wzmocnieniu +1 ma przeregulowanie ca 5-15%.
B. Częstotliwość sieci energetycznej i ilość pulsów m komutowanego siecią prostownika -invertera wyznaczają ( patrz uwaga dalej) zastępczą „małą stałą czasową”. Gdy zależy nam na wysokiej jakości serwonapędu stosujemy dwa pełne mostki trójfazowe ( m=6 ) połączone antyrównolegle czyli łącznie 12 tyrystorów. Gdy wymagania są mniejsze dajemy m=3 i układ 6 tyrystorowy. Gdy wymagania są małe dajemy sterownik jednofazowy z m=2. Napięcie i prąd wyjściowe invertera mają pulsacje. Podanie ich wprost do regulatora PI prądu silnika powoduje pojawienie się drgań subharmonicznych w obwodzie regulacji. Pozbywamy się ich wprowadzając prosty filtr RC czyli filtr I rzędu. Oczywiście powiększa on „mała stała czasową” ale jest konieczny. Odpowiedź invertera ma zmienne opóźnienie, pulsacje i nieliniowość a mimo tego zastępcza „mała stała czasową” w projektowaniu bardzo dobrze się sprawdza !
C. Częstotliwość modulacji PWM oraz ilość swobodnych zboczy sygnału powstających przez porównanie komparatorem modulatora PWM sygnału piłokształtnego z sygnałem wejściowym ( zachodzi przetwarzanie A/D ) wyznacza „małą stałą czasowa”. Z niektórymi rodzajami modulacji PWM konieczna jest filtracja sygnału napięcia lub prądu z pulsacjami dla zapobieżeniu drganiom subharmonicznym. Odpowiedz modulatora ma opóźnienie i pulsacje a mimo tego zastępcza „mała stała czasową” w projektowaniu bardzo dobrze się sprawdza !
D. Masy i sztywność układu mechanicznego serwomechanizmu wyznaczają mechaniczne częstotliwości rezonansowe. Dla stabilizacji pętli sprzężenia zwrotnego serwomechnizmu stosuje się filtr dolnoprzepustowy ( czasem dodatkowo środkowozaporowy na częstotliwości rezonansu ) obniżający piki rezonansowe. Od razu widać co trzeba zrobić aby skrócić czas pozycjonowania głowic twardego dysku HD. Ramie z głowiczkami musi być lekkie i sztywne a materiał ( tytan się nadaje znakomicie ) musi dobrze absorbować drgania.
E. Optyczny kwadraturowy impulsowy sensor położenia w serwomechanizmie ma określoną ilość impulsów na obrót. Powoduje to efekt kwantyzacji, nieczułości i wprowadzenie szumów. Nie jest to wprost „mała stałą czasowa” ale zachodzi jak gdyby jej substytut. Serwomechanizm ma tym lepsze właściwości im sensor ma więcej impulsów na obrót.
Sprawa „małej stałej czasowej” wydaje się wyjaśniona a Czytelnik może podać kolejne przykłady.
Dlaczego Kessler wybrał maksymalnie płaską aproksymację Butterwortha, zresztą nic nie mówiąc o aproxymacji i filtrze? Przecież równomiernie falista charakterystyka Tschebyshewa I rodzaju dałaby trochę szersze pasmo.
NB. Przy falistości dążącej do zera charakterystyka Tschebyshewa dąży do Butterwortha.
„Mała stałą czasowa” może też być suma mniejszych kaskadowych stałych czasowych. Ta własność metody Kesslera jest wprost zdumiewająca !
Na rysunku pokazano małosygnałowe odpowiedzi skokowe dwóch pętli regulacji (z wypadkowym „całkowaniem” ) sporządzonych według optimum modułu. W jednej pętli jest „mała stała czasowa Ts” w drugiej pętli są dwie kaskadowo połączone inercje Ts/2. Odpowiedzi trochę się różnią co jest oczywiste ale przecinają się w dwóch miejscach przeplatając się. Przeregulowanie jest takie samo w obu wypadkach a czas regulacji podobny. Zieloną linią pokazano dziesięciokrotnie powiększoną różnice odpowiedzi. Ten błąd jest jak gdyby równomiernie falisty !
Taka sytuacja ma miejsce tylko przy rekomendacji Kesslera. Przy kaskadowym połączeniu stałych czasowych nie równo podzielonych ( na przykład 0.2Ts i 0.8 Ts) różnice odpowiedzi są jeszcze znacznie mniejsze. Różnice w odpowiedzi układów regulacji kolejnych rzędów ( układy są obiektem w kolejnej pętli ) jeszcze bardziej maleją ! Różnice są dalej niewielkie przy podzieleniu Ts ma trzy kaskadowe inercje.
Natomiast jeśli dwukrotnie zmniejszymy stałą czasowa wypadkowego integratora ( z pojedynczą małą stałą czasowa dobroć Q=1 czyli tłumienie Beta=0.5) to błąd w odpowiedziach robi się duży ! Zatem aproxymacja maksymalnie płaska ma kolejną zaletę !

Sinusoidalny sygnał testowy o znikomych zniekształceniach nieliniowych jest doskonały do testowania zniekształceń nieliniowych układów liniowych a w tym OPA.
Sygnał sinusoidalny służy do wyznaczenia charakterystyki częstotliwościowej. Dla układu minimalnofazowego z charakterystyki amplitudowej A(w) wprost wynika charakterystyka fazowa. Wszechprzepustowy korektor fazy ma płaską charakterystykę amplitudową i jest oczywiście nieminimalnofazowy. Obiekty nieminimalnofazowe są trudne do regulacji analogowej i szczególnie programowej !
Zniekształcenia nieliniowe OPA rosną z częstotliwością sygnału, napięciem wyjściowym i obciążeniem. Są już produkowane OPA mające ogólnie THD poniżej 0.0001%. OPA JFET mają znacznie większe THD w konfiguracji nieodwracającej z racji niezbyt dużego tłumienia sygnału wspólnego CMRR.
Ale OPA współpracujący z przetwornikiem D/A testowany jest sygnałem prostokątnym czyli skokiem bowiem tu ważny jest czas ustalania odpowiedzi po podaniu DAC nowej cyfrowej próbki sygnału a ubocznie szybkość jej narastania. W automatyce pas ustalenia wyjścia obiektu wynosi 2-5% zaś dla OPA pracującym z DAC 0.01%.
W testowaniu układów cyfrowych wygodna jest sekwencja sygnału binarnego z prostego rejestru liniowego czyli PRBS.
Dlaczego w automatyce za reprezentatywną uważa się odpowiedź obiektu i pętli regulacji na skok nawet jeśli ona realnie nie pracuje z takim sygnałem lub innym tak szybko zmiennym ? Transformata Laplace'a s skoku to 1/s. Zatem jego widmo opada w przybliżeniu tak samo jak reprezentowane harmonicznymi dyskretne widmo ( szereg Fouriera ) okresowego sygnału prostokątnego co jest poniekąd oczywiste.
Serwomechanizmy maszyn CNC i robotów mają dokładnie śledzić zadane programem trajektorie pracy. Trajektoriami podążają rakiety, pojazdy kosmiczne, manewrujące pocisku samosterujące, samoloty. Wyznaczoną mu trajektorią minimalnoczasową podąża układ pozycjonujący głowice twardego dysku HD przy dużych przemieszczeniach. Także napęd zautomatyzowanego laboratorium biochemicznego podąża trajektorią minimalnoczasową wyznaczoną sterującym komputerem.
Dyspozycja mocy podaje blokom elektrowni zadaną wartość generacji elektryczności. Ponieważ odpowiedź bloku cieplnego jest powolna zadana wartość nie powinna się gwałtownie zmieniać bowiem "z pustego i Salomon nie naleje". Tak samo wartości zadane w procesie chemicznym / petrochemicznym nie powinny się gwałtownie zmienić.
Stosowany analogowy lub programowy Ramping ogranicza szybkość zmian sygnału zadanego i polepsza odpowiedź pętli sprzężenia zwrotnego. Podobny a czasem lepszy rezultat otrzymany podając sygnał zadany w regulatorze PID / PI tylko do całkowania ! Obecnie sygnał zadany nie jest już podawany do różniczkowania D w regulatorze PID ( a podane jest tylko wyjście obiektu ) co prawie zawsze jest pozytywem. Generalnie konfiguracji regulatora PID jest wiele, ponad 10.
Gdy serwomechanizmom maszyny CNC lub robota podamy zbyt szybko zmieniające się wartości zadane to regulatory serwomechanizmów ulegną nasyceniu i trajektorie będą dość dowolne i w rezultacie w maszynie CNC narzędzie może zahaczyć / uderzyć w obrabiany przedmiot i narzędzie / maszyna ulegnie uszkodzeniu.
Natomiast skok wartości zadanej otrzymuje regulator temperatury zadanej w piecu dyfuzyjnym czy innym gdy zostaje załączony i jest przygotowywany do pracy.
Regulator PI/PID jest nadal koniem roboczym i w świecie ponad 95% pętli regulacji go stosuje. Określenie "PID" jest niepełne skoro urządzenie do DCS typu TDC-2000 ma 10 konfiguracji regulatora "PID" do wyboru a nowsze urządzenia DCS mają jeszcze więcej wariantów. Wyznaczenie optymalnych nastaw regulatorów jest trudne co często daje złą regulacje i desperackie przełączanie na Manual czyli sterowanie ręczne. Nierzadko niewłaściwa jest konfiguracja systemu regulacji i nie może on poprawnie działać. Faktycznie automatyczna regulacja będzie normą a nie wyjątkiem dopiero za jakiś czas.
W programach komputerowych do symulacji wszelkich zjawisk używa się arytmetyki zmiennoprzecinkowej która jest bardzo powolna. Koprocesor zmiennoprzecinkowy 8087 do komputerów PC znacznie przyśpiesza operacje zmiennoprzecinkowe ale nadal nie są one szybkie. Toteż do końca lat siedemdziesiątych używano komputerów hybrydowych. Szybka maszyna analogowa przeprowadzała "zlecone" ( przetwornikami D/A ustalającymi współczynniki modelu oraz warunki początkowe i brzegowe oraz portem równoległym bity opcji i kontrolne ) przez kierujący nią komputer wyliczenia lub symulacje w czasie milisekund przekazując komputerowi wyniki wielokanałowym przetwornikiem A/D.
Optymalizacja wymaga wielokrotnego wyliczenia funkcji celu. Przy dużej ilości zmiennych potrzeba tysięcy symulacji co uzasadniało stosowanie maszyn hybrydowych szczególnie w zaawansowanych projektach. Gdy znacznie wzrosła wydajność komputerów maszyny analogowe-hybrydowe porzucono.
Podróbki komputerów HP-2100 produkowane są w Polsce i w Czechosłowacji (ADT-4000) gdzie używane są w różnych elektrowniach, przemyśle, w wojsku i w biurach projektowych.
Aritma od 1974 roku produkowała komputer hybrydowy ADT-7000 składający się z maszyny analogowej z interface do komputera ADT-3000 i wspomnianego komputera ADT-4000 zgodnego z HP-2100. Klienci zupełnie nie byli zainteresowani maszyną analogową ADT-3000 i po zakupie zestawu ( długi był czas oczekiwania na samą ADT-4000 ) lądowały one w piwnicach.
Oczywiście dla tego samego zadania symulacji wyniki pracy maszyny analogowej powinny być identyczne jak cyfrowej.
Bloki maszyny ADT-3000 nie są elastyczne w zastosowaniu i trzeba użyć znacznej ich ilości. W rezultacie nie można nawet rozwiązywać na niej zadań średniej wielkości co owocuje niezadowoleniem nabywców i porzuceniem maszyn.
Maszyna ADT3000 ma analogowy monitor na którym można obserwować symulacje. Ponieważ symulacje są szybkie można obserwować natychmiastowe rezultaty zmiany ustawień parametrów i warunków początkowych modelu oraz opcji binarnych.
N.B. Maszyna analogowa na równi z komputerem dobrze nadaje się do nauki wyższej matematyki.
Poniżej jest 5 wykresów identycznych na ekranie komputera cyfrowego i na ploterze sterowanym maszyną analogową. Zrobienie trajektorii pseudo 3D jest jak widać trywialne.





Procesowymi Wejściami systemu DCS są sensory analogowe i binarne. Wyjściami i organami wykonawczymi systemów przemysłowych są:
-Przekaźniki, styczniki, CB i tyrystory do sterowania przez PLC oraz regulacji dwupołożeniowej
-Silniki asynchroniczne ( zależnie od mocy dwufazowe z kondensatorem 24V – 220 V i trójfazowe 380 V) załączane w kierunkach przez regulatory krokowe
-Siłowniki pneumatyczne ( szczególnie w strefach zagrożonych wybuchem ) kontrolowane przez elektroserwozawory sterowane prądem 4-20 mA z DCS
-Siłowniki hydrauliczne kontrolowane przez elektroserwozawory sterowane prądem 4-20 mA z DCS
-Inne wykonawcze urządzenia sterowane analogowo prądem 4-20 mA lub napięciem 0-10V lub +-10V jak serwomechanizmy.
Rola przykładowych programów i konfiguracji dla systemu DCS jest ogromna. Do "demonstracyjnego " DCS ma być jednocześnie dołączonych przewodami wiele tanich-prostych symulatorów obiektów lub conajmniej sensorów i aktuatorów no i oczywiście komputer PC do komunikacji i operowania systemem.
Wszystkie wymienione zadania mogą być realizowane jednocześnie !
1. Symulator abstrakcyjnego obiektu inercyjnego 3 rzędu ( także traktowanie go jako modelową inercje i opóźnienie) czyli omówiony dalej filtr Sallena - Keya otrzymuje z DCS sygnał analogowy 0-10 V /+-10 V lub 0/4-20 mA a daje sygnał wyjściowy 0-10 V /+-10 V a z wyjściowym opornikiem i rezystorem polaryzującym (załączanym Jumperem ) z Vc dają na rezystancji wejściowej DCS symulowany sygnał „sensorów” zakresów 0/4-20 mA
Dwa sygnały binarne z regulatora krokowego mogą być wcześniej symulatorem napędu zamienione na analogowy sygnał 0-10 V /+-10 V lub 0/4-20 mA i podane do symulatora – filtru SK.
Można przeprowadzić eksperyment identyfikacyjny i nastroić regulator lub aktywować samonastrajanie, jeśli takowa funkcja jest.
N.B. Pierwszy regulator PID samonastrajający się zastosowała w swoim DCS amerykańska firma Northrup Leeds w 1981 roku a za nią podążają naśladowcy. Ale zadanie jest trudne i mimo wysiłku rezultaty nie są satysfakcjonujące.
2.Sensor temperatury w obudowie przemysłowej ( a jest w niej PT100, TC-K, NTC, tranzystor, IC... ) z wyjściem 4-20 mA umieszczony jest w wodzie w biurowym czajniku elektrycznym 2KW/220V.
Zaletą modeli fizycznych jest ich realność, namacalność i siłą przekonywania.
-DCS załącza przekaźnikiem mocy ( faktycznie triak załączany i wyłączany bezzakłóceniowo w Zerze ) grzałkę (ulepszona regulacja dwupołożeniowa ) czajnika napełnionego wodą doprowadzając ją do zadanej temperatury (może być wcześnie wyliczana programem lub wodzona ) a nawet utrzymując ją delikatnie we wrzeniu.
-DCS regulatorem krokowym reguluje „symulatorem aktuatora i zaworu dopływ pary grzewczej" do ogrzewania reaktora (czajnika). Układ symulatora dostaje z DCS krokowe sygnały binarne wytwarzając analogowy sygnał położenia zaworu ( z ograniczeniami pełnego otwarcia i zamknięcia sygnalizowanymi sygnałami binarnymi ), który może ( ale nie musi ) być podany do DCS ( także na rysunku na ekranie PC ) i jest podany do tyrystorowego sterownika fazowego zasilającego grzałkę czajnika
-Sygnał analogowy 4-20 mA lub 0-10 V z DCS jest podany do tyrystorowego sterownika fazowego zasilającego grzałkę czajnika. W realnym systemie przemysłowym sygnał 0/4-20 mA podany jest do przetwornika I/P i ustala stopnień otwarcia pneumatycznego zaworu pary / wody grzejnej.
Komputer PC połączony łączem szeregowym - siecią z DCS na rysunku reaktora na ekranie pokazuje Temperaturę wody w czajniku i stan załączenia binarnego lub analogowego grzałki lub rysunek zaworu ze stanem otworzenia i działania krańcówek. Na twardym dysku HD program zapisuje historie temperatury zadanej i wyjściowej do późniejszego obejrzenia. Procedura samonastrajania może wyznaczyć optymalne parametry regulatora PI-PID a w trywialnym przypadku skoku podać sugerowane parametry do zatwierdzenia lub edycji.
Regulowany sygnałami analogowymi lub krokowymi przez DCS Wentylator (patrz dalej ) służy do odbioru ciepła od czajnika jako zakłócenie. Do czajnika można dolać zimnej wody jako inne zakłócenie
3.Kolejne sensory ( Temperatury, Oświetlenia, Pirometr, RH ) skojarzone w DCS i na komputerze z czymkolwiek można demonstracyjnie równolegle pobudzać (ogrzewać palcami, chuchnięcie, zapalenie zapalniczki / zapałki, zapalenie światła, zmiana położenia żaluzji ) .
4.Małe pomieszczenie z sensorami Temperatury i wilgotności względnej RH jest algorytmem ( NIC ) optymalnie ( adekwatnie do wartości zadanych T i RH ) :
-Ogrzewane załączanym termowentylatorem regulującym temperaturę
-Ogrzewanie przenośnym piecykiem gazowy (gaz z butli ) dostarczającym też do atmosfery pomieszczenia wodę w spalinach z gazu.
-Równolegle nawilgacane i ogrzewanie gotującym się czajnikiem z wodą
-Nawilgacane nawilżaczem mechanicznym lub ultradźwiękowym.
Mamy tu trudne rozprzężenie pętli regulacji T i RH czyli zadanie NIC - Non Interactive Control.
5.Tam gdzie jest gaz sieciowy i serwozawór można stabilizować temperaturę wody z przepływowego boilera ( czyli niby energetyczny piec przepływowy ) regulatorem krokowym operującym elektroserwozaworem ( wskaźnik położenia zaworu to sensor LVDT lub Potencjometr plus sygnały binarne krańcówek ) gazu. Może być też symulowana sekwencja rozruchowa (sterowanie logiczne z DCS lub PLC ) z wietrzeniem pieca ( zapobieżenie wybuchowi resztek palnych gazów w komorze spalania) i zapaleniem gazu.
Boiler gazowy z regulacją krokową można symulować przepływowym boilerem elektrycznym. Moc dostarcza sterownik fazowy ale sterowany symulatorem krokowo !
Można łatwo regulować temperaturę za samym boilerem i trudno regulować ( duże opóźnienie i złożony układ z co najmniej dwoma sensorami temperatury ) temperaturę za długim rurociągiem czyli wężem zwiniętym na bębnie.
Struktury regulacji dla „Energetyczny Kocioł przepływowy dużej mocy” podał Z.Trybalski
6.Przykładem z sensorem pH może być neutralizacja pH ( trudna regulacja ) słabego roztworu w małym szklanym pojemniku z mieszadłem magnetycznym i ewentualnym sterowanym podgrzewaniem. Gdy nie mamy automatycznego dozownika - strzykawki do neutralizującego "kwasu/zasady" to człowiek obserwując zapalenie się wyjściowych diod LED lub lampek ( Up - Down) jako rozkazów operuje ręczną strzykawką.
Ale system symulacyjny może być czysto elektroniczny bez sondy pH. Nieliniową charakterystykę otrzymamy prostym wzmacniaczem logarytmicznym z tranzystorami komplementarnymi według definicji wskaźnika PH ze stężenia roztworu
Także sprawdzana jest sekwencja mechanicznego / chemicznego czyszczenia sensora obserwowana zapalaniem się lampek dla organów wykonawczych, których jednak nie ma choć zbudowanie prostego układu logicznego (CMOS4000 plus elementy dyskretne) czyli systemu pozorującego nie jest trudne.
7.Regulacja szybkości strumienia powietrza z użyciem wentylatora /odkurzacza ( podciśnienie i nadciśnienie ) i anemometru termicznego z „żarówką” lub tranzystorem. Wentylatory mają silnik asynchroniczny ale różnie reagują (musi być „odpowiedni” ) na napięcie z fazowego sterownika tyrystorowego otrzymującego sygnał z DCS lub symulatora dla regulatora krokowego udającego zmianę kąta nastaw łopat turbiny.
Silnik uniwersalny odkurzacza działa idealnie przy sterowaniu fazowym.
8.Model silnika spalinowego samochodu osobowego jest konieczny przy opracowaniu programu dla mikrokontrolera systemu wtrysku paliwa i elektronicznego zapłonu. Dopiero gdy program jako tako działa możemy go testować na prawdziwym silniku spalinowym na hamowni.
Do modułu symulatora doprowadzone są impulsowe sygnały dla wtryskiwaczy i sygnał sterujący tranzystor Darlingtona zapłonu ( z komputerka ) oraz moment obciążenia i analogowe otwarcie przepustnicy jako potencjometry. Model wydaje komputerkowi impulsowe sygnały położenia wału korbowego. Model taki jest prostszy niż może się wydawać. Kluczem jest modelowanie ilości energii uwolnionej po procesie wtrysku paliwa i zapłonu w funkcji położenia tłoka w danym cylindrze.
9.Symulator redundantnego zespołu 2-4 załączanych kompresorów ze zbiornikiem sprężonego powietrza z wyjściami/”sensorami” analogowymi i/lub binarnymi. Sterowanie kompresorów jest binarne On-Off. Sygnały wyjściowe ciśnienia 4-20 mA i binarne ciśnienia z histerezą . Obciążenie poborem sprężonego powietrza quasi przypadkowe z generatora szumów 1/F.
10.Symulator silnika turboodrzutowego jest konieczny przy opracowaniu programu dla mikrokontrolera zawiadującego tym silnikiem. Dopiero gdy program jako tako działa możemy go testować na prawdziwym silniku na oprzyrządowanej – komputerowo opomiarowanej hamowni gdzie każda godzina pracy sporo kosztuje.
11.Bardzo złożony jest symulator mocnego Agregatu Diesla m.in. z trójfazowym wyjściem 50 Hz mikro mocy. W istocie jest to mały blok elektrowni. Testowana jest sekwencja rozruchu, synchronizacji - włączenia do równoległej pracy, zmiana obciążenia i podział obciążenia oraz odstawienie.
12.Pętla regulacji temperatury „żaru” z Zarówką ( dużą oświetleniową 220 Vac sterowaną fazowo) i pirometrem ( omówiony w „Przykłady” ).
13.Wdzięcznym obiektem do aranżacji wielu eksperymentów z dziedziny automatyki jest automatyczna pralka:
-Sekwencja prania dla PLC
-Stabilizacja Temperatury kąpieli.
-Regulacja obrotów silnika uniwersalnego (silnik jest zintegrowany z sensorem obrotów Pick Up Coil) sterownikiem fazowym z triakiem.
-Algorytm inteligentnego zwiększania szybkości wirowania bez wstrząsów z użyciem „akcelerometru”
-Binarne sensory hydrostat i przyszłościowy sensor rozlania wody na podłodze.
14.Winda może być złożonym obiektem sterowania. Są proste windy ze sterowaniem logicznym PLC i wyrafinowane szybkobieżne windy do wysokościowców z serwonapędem pozycyjnym. Szybkobieżne windy stosują tyrystorowy napęd DC lub najnowsze rozwiązania silnik asynchroniczny sterowany inverterem. W prostych windach jest stosowany silnik asynchroniczny pierścieniowy lub dwubiegowy. Użyte są sprzęgła i hamulce. Płynne hamowanie dynamiczne prądem stałym DC podnosi jakość pracy. Fazowo sterowane Tyrystory podają wtedy prąd stały do stojana silnika.
W ogólności obiekty do regulacji ciągłej są:
-Wieloinercyjne ale nawet one przy zbyt długim okresie próbkowania w wersji dyskretnej może być nieminimalnofazowe
-Inercyjne z tłumionymi oscylacjami
-Inercyjne z tłumionymi oscylacjami i opóźnieniem
-Nieminimalnofazowe gdzie początek odpowiedzi obiektu jest w przeciwnym kierunku co powinien
-Całkujące
-Niestabilne oscylacyjnie
-Niestabilne monotonicznie
Odpowiedź obiektu II rzędu nie ma opóźnienia ale coś podobnego do opóźnienia mają dopiero obiekty wyższego rzędu. Im wyższy jest rząd obiektu tym wyraźniejsze jest to „opóźnienie” ale wcale nie musimy symulować opóźnienia.
W fizyce opóźnienie polega na rozchodzeniu się fali elektromagnetycznej, akustycznej lub innej.
Ultradźwiękowa linia opóźniająca czyli rejestr cyrkulacyjny jako pamięć RAM ( w rzeczywistości nie RAM ale używana jako powolny RAM ) stosowana była w pierwszych komputerach początka lat pięćdziesiątych.
Opóźniająca linia ultradźwiękowa 64 us używana jest w dekoderach koloru systemów TVC Pal i Secam. Środkowoprzepustowa ( podnośne koloru R-Y i B-Y ) dopasowana jest z obu stron niskoodbiciowo indukcyjnością 10 uH i rezystancją 390 Ohm. Mogą być one zastąpione rejestrami CCD dla sygnałów baseband R-Y i B-Y.
Sygnał luminancji jest w TVC opóźniany linią circa 400 ns nawiniętą długim cienkim drucikiem na walcu lub płaskim prostopadłościanie. Dla minimalizacji zniekształceń liniowych linia jest odpowiednio impedancyjnie obustronnie dopasowana a odpowiedź linii jest dodatkowo korygowana.
Po to aby na ekranie oscyloskopu widoczne było szybko narastające zbocze sygnału w torze Y oscyloskopu jest stosowana linia opóźniająca o czasie 1-50 ns.
W kablach fala elektromagnetyczna propaguje z szybkością około 0.6 c.
Stratność kabli telekomunikacyjnych rośnie z częstotliwością i do spłaszczenia wynikowej charakterystyki częstotliwościowej stosowano w telefonii nośnej Equalisery. Equalizacja sygnałów cyfrowych jest trudniejsza z uwagi na nieliniową charakterystykę fazową kabla zniekształcającą sygnał w dziedzinie czasu. Pasmo kabla koncentrycznego jest ograniczone i powyżej częstotliwości granicznej trzeba stosować falowód. Temat Equaliserów jest porządnie omówiony w numerach BSTJ łącznie z podaniem schematów i wykresów charakterystyk.
Na wzór komputerowych linii opóźniających z początka lat '50 można by kablowi koncentrycznemu z equaliserem podawać sygnał cyfrowy o szybkości >1 Gbit/s i go opóźnionego odbierać ale uzyskana w ten sposób pamięć jest zupełnie niekonkurencyjna do pamięci półprzewodnikowych.
Kondensator C jest analogową pamięcią jednej próbki sygnału. Stała czasowa upływu - zapominania wynosi poniżej <10E5 sekund.
Monolityczna piko-pojemność C kształtu V ( specjalna technologia dla produkcji pamięci dynamicznych DRAM ) w pamięci dynamicznej DRAM jest bardzo mała. Z uwagi na upływ konieczne jest odświeżanie zawartości pamięci DRAM co kilka milisekund.
Indukcyjność jest analogową pamięcią. Stała czasowa L/R jest jednak mała a nawet bardzo mała
W cząstkowym równaniu różniczkowym Telegrafistów modelu linii, elementarne dL i dC są nieskończenie małe. Są stratne. Czy zatem linia ma nieskończoną ilość zgromadzonej informacji ?
Realnie nie ma ponieważ szybko rośnie z częstotliwością jej tłumienie.
Ile conajmniej musi być sztuk komórek pamięci analogowej w linii opóźniającej jak CCD - Teoria próbkowania i rekonstrukcji sygnału daje odpowiedź: 2 x BW x To
Im bardziej selektywny jest filtr ( wykresy za rosyjskim wydaniem - Digital Communication by Sattelite, J.J. Spilker, Prentice Hall, 1976) tym bardziej nierówna jest charakterystyka opóźnienia grupowego.
Od góry, od lewej do prawej są opóźnienia grupowe filtrów: Butterwortha, Tschebyshewa o falistości 0.1 dB, Tschebyshewa 2 dB, Besela, Buttewortha - Thomsona i Legendre

Konieczne jest zatem w selektywnych filtrach stosowania korektorów fazy nieliniowo zaburzonej przez filtry. Charakterystyka częstotliwościowa korektora fazy jest wszechprzepustowa i płaska (przynajmniej w interesującym zakresie częstotliwości ) a charakterystyka fazowa użyta jest do korekcji nieliniowej fazy filtru.
Charakterystyka tłumienia i opóźnienia grupowego filtru Butterwortha pokazano jeszcze na dokładniejszym wykresie .

Filtr II rzędu ma Wo=1.73 i Q=0.58
Filtr III rzędu ma We=2.32 , Wo=2.54 i Q = 0.69.
Filtr IV rzędu ma 1 (Wo=3.02, Q=0.52) i 2 (3.39 , Q=0.8)
Filtr V rzędu ma We=3.65, 1 (Wo=3.78, Q=0.56) i 2 ( Wo=4.26, , Q=0.92)
Jak widać dobroci są niewielkie i łatwe do zrealizowania. W szczególności filtr III rzędu Sallena Keya można zrealizować na jednym OPA.
Gdy obiekt ma być oscylacyjny wystarczy podnieść dobroć Q jednego członu.
Transmitancja korektora ( z operatorem s ) fazy I i II rzędu ma mianownik jak każdy filtr a licznik taki sam ale ze znakiem '-' przy wyrazie z s. Charakterystyka częstotliwościowa A(w) jest zatem płaska.
Na rysunku pokazano realizacje dolnoprzepustowych korektorów I i II rzędów ze wzmacniaczem operacyjnym.
Korektor I rzędu dla małych częstotliwości ma wzmocnienie -1 ( przesunięcie fazy 180 deg wzmacniacza odwracającego ) czyli odwraca fazę a dla dużych ma wzmocnienie 1 i nie odwraca fazy dlatego że z wejścia dodatniego OPA wzmocnienie wynosi 2.
Korektor II rzędu dla małych i dużych częstotliwości ma wzmocnienie -1 czyli odwraca fazę a dla częstotliwości rezonansowej LC ma wzmocnienie 1 i nie odwraca fazy.
Dla sygnałów zmiennych AC korektor można wykonać na jednym tranzystorze !
Przy stosowanej w TV i TVC modulacji VSB negatywny wpływ nierównego opóźnienia grupowego filtrów IF był tolerowany w TV Czarno - Białej ale w TVC dawał niedopuszczalne prześwity i zafałszowania kolorów. Zmiany opóźnienia grupowego o 100 ns dają już łatwo zauważalne pogorszenie jakości odtwarzania obrazu. W filtrach LC pośredniej częstotliwości TVC jako korektory fazy stosowano topologie skompensowanej pułapki ( czyli zero w filtrze eliptycznym ) ale bardzo silnie przekompensowanej. Pokazano to na przykładzie TVC Jowisz.
Oprócz komplikacji wadą jest znaczne bo 16 dB tłumienie korektora wymagające extra tranzystorowego stopnia wzmocnienia.
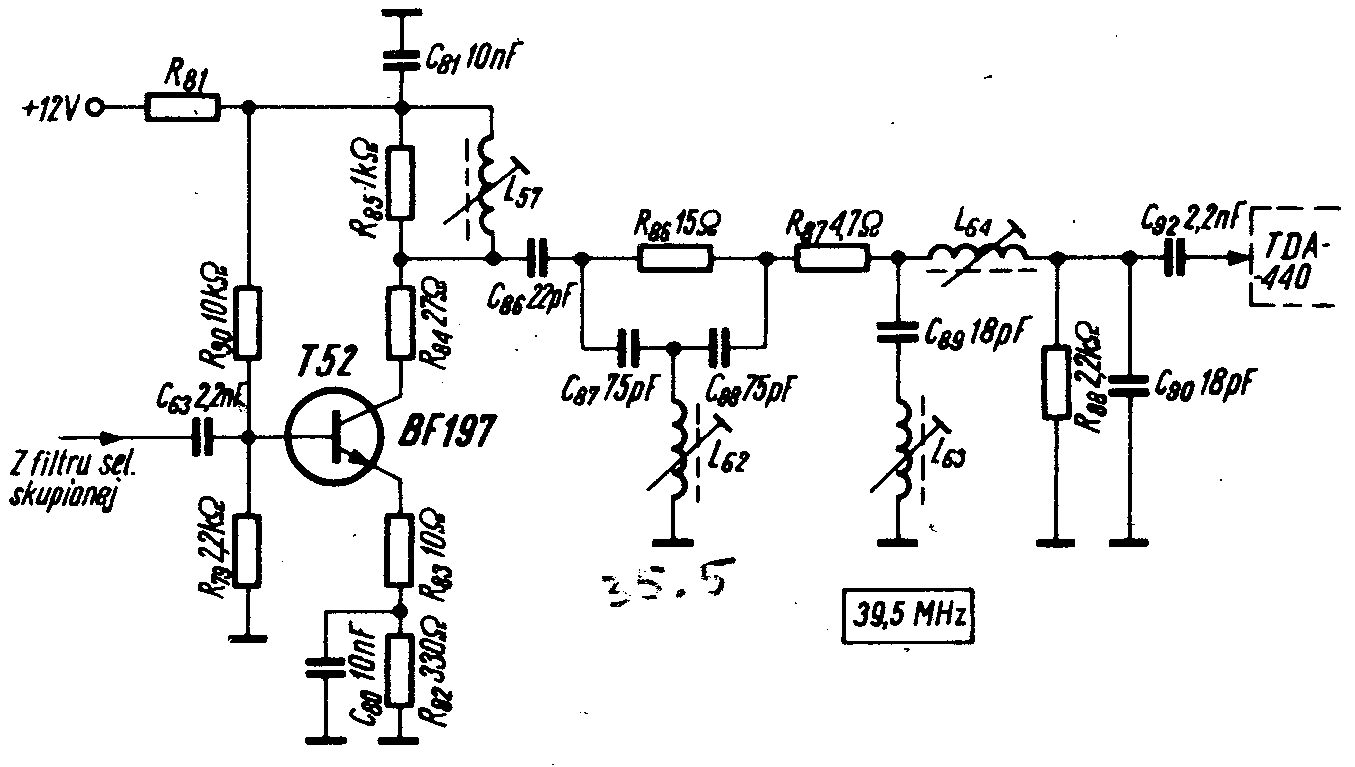
W wysokiej klasy japońskich odbiornikach TVC stosowany jest dodatkowy korektor fazy II rzędu dla zdemodulowanego kompleksowego sygnału Video zbudowany z tranzystora i szeregowego obwodu LC ( schemat pokazano wcześniej, przykład do symulacja Microcap).
Czas narastania opóźnionego skoku sygnału wynosi nadal Zero.
Na wykresie pokazano wyjście z obiektu z 5, 20, 30, 40 kaskadowymi buforowanymi identycznymi inercjami (suma stałych czasowych jest zawsze taka sama ) czyli elementami pamięciowymi po podaniu skoku jednostkowego. Za czas opóźnienia możemy uznać czas do poziomu zerowego stycznej prowadzonej w połowie czyli 50 % odpowiedzi a za czas narastania czas dla stycznej od poziomu 0 do 100%. Im wyższy jest rząd tej aproxymacji tym iloraz opóźnienia do czasu narastanie jest większy i aproksymacja opóźnienia jest lepsza.
Ile faktycznie potrzeba owych inercji w tym łańcuchu ? W aproxymacji realnych odpowiedzi (a nie samego wydumanego opóźnienia) obiektów iloraz czasu narastania do opóźnienia jest dość duży i rzadko potrzebna jest aproksymacja rzędu wyższego od 3-5 !
Aproksymujemy zatem nie samo opóźnienie a kompletną odpowiedź obiektu !

Są wszechprzepustowe ale odpowiedź na skok jednostkowy jest paskudna i żaden obiekt regulacji nie ma takiej dziwacznej odpowiedzi. Zatem jest to droga donikąd.
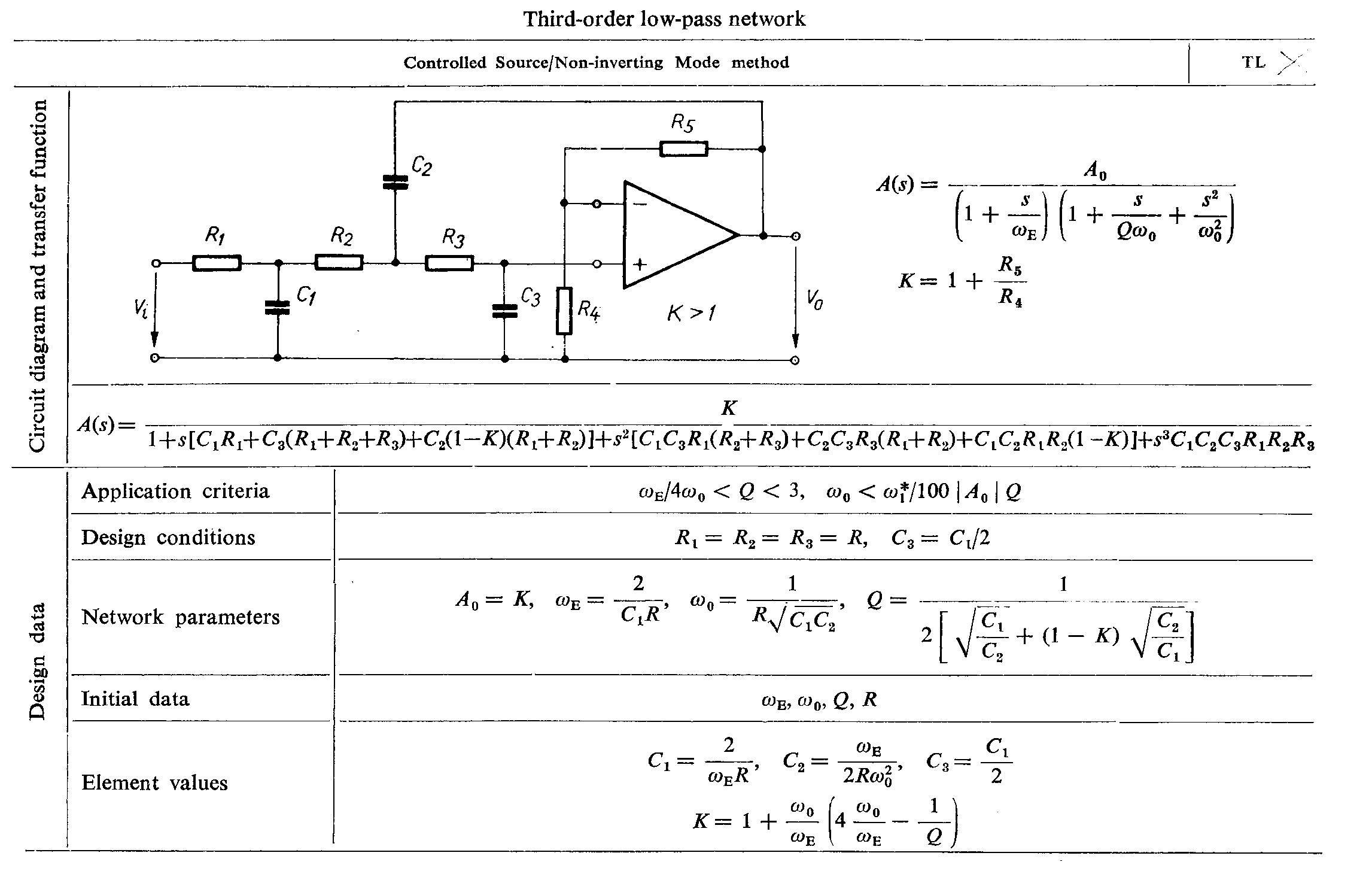
Regulowany napięciem dolnoprzepustowy filtr 3 rzędu do symulacji zachowania obiektów.
Optymalne wzmocnienie regulatora PI-PID z trudnym kontrolowanym obiektem może być nawet mniejsze od jedności. Przy małych wzmocnieniach czasem poprawę ( przykładowo sprzężenie wprzód) jakości sterowania dają modyfikacje algorytmu PID.
Zatem filtr dolnoprzepustowy w symulatorze udając trudny obiekt także winien powodować oscylacje pętli już z niedużym wzmocnieniem regulatora PI – PID.
Realizacja filtru do symulatora powinna być bardzo oszczędna elementowo jako że potrzebna ich do eksperymentów najmniej kilka.
Na sprawę filtrów trzeba spojrzeć z odpowiedniej perspektywy.
W omawianych przykładach aktywne środkowoprzepustowe filtry RC są użyte do filtracji sygnału drugiej harmonicznej ( w stosunku do sygnału wzbudzenia ) z Flux Gate w autopilocie. Realizacja angażuje mało elementów a jest wysokiej jakości. W starym przyrządzie HP-428 z Flux Gate użyto w tym samym celu filtru LC.
Im mniejsza jest częstotliwość Wo tym filtry LC są kosztowniejsze. Temat aktywnych filtrów RC jest nadal popularny. Wydano już w świecie ponad 100 książek na ten temat a liczba publikacji "naukowych" przekroczyła 4 tysiące. Wynika z nich niewiele lub wprost nic. Biurokratyczna pozoracja nauki nie jest jak widać tylko polską specjalnością.
Podstawową wadą owych książek i publikacji jest połowiczność rozważań, oderwanie od rzeczywistości i wyrwanie tematu z kontekstu
Filtr aktywny RC realizuje się kaskadą filtrów II i rzadko III rzędu. Im filtr ma większą selektywność tym większe są wymagane dobroci Q tych elementarnych filtrów. Kluczowa jest wrażliwość dobroci Q na zmiany elementów R i C a czasem i parametry wzmacniacza operacyjnego. Ponieważ cena dokładnych elementów RC szybko rośnie z ich dokładnością i stabilnością długoczasową należy wybrać odpowiednie kosztowo topologie składowych filtrów II i rzadziej III rzędu.
Rzadko w publikacjach podnosi się to do czego filtry aktywne RC są masowo i profesjonalnie stosowane.
Normy międzynarodowe dotyczące cyfrowej telefonii PCM podają wykresy minimalnego tłumienia pozapasmowego ( 300-4000 Hz ) antyaliasingowych filtrów dolnoprzepustowych nadawczego i odbiorczego. Takie filtry LC do telefonicznych central PCM z indukcyjnościami z rdzeniami ferrytowymi i permalloyowymi oraz precyzyjnymi kondensatorami styrofleksowymi lub polipropylenowymi były drogie i duże. Wcześniej podobne filtry stosowano w systemach telefonii nośnej
Bell Laboratories ma największa liczbę Noblistów spośród wszystkich firm świata i ma ich więcej niż większość państw świata. Numery Bell System Technical Journal mają do 700 stron objętości ! BSTJ to najlepsze czasopismo naukowo - techniczne świata. "Nobles oblique" W BSTJ z 1974/2 roku obszernie opisano całe projektowanie z optymalizacją eliptycznych dolnoprzepustowych filtrów aktywnych RC do central PCM. To unikalne źródło pokazujące zarazem pustkę w głowach autorów książek o filtrach aktywnych. Filtry te w technice grubowarstwowej ( trymowanej, stąd pozorny nadmiar rezystorów ) są masowo produkowane przez Western Electric wchodzący razem z BL w skład potężnego koncernu AT&T. Filtry mają zaledwie po dwa wzmacniacze operacyjne. Autor polutował na niewytrawionej PCB filtry nadawczy i odbiorczy i próbkujący klucz między nimi. Nawet bez trymingu rezultat jest całkiem dobry ! Na schemacie jest filtr nadawczy.

Potężny duet koncernów Philips Sony opracował "standard" dla cyfrowej płyty Compact Disc. Ich standard stał się standardem światowym. Wymagania na dolnoprzepustowy filtr antyaliasingowy do systemu CD były tak surowe że nie udało się takiego aktywnego filtru RC stworzyć mimo użycia doskonałych OPA i najlepszych elementów RC ! Standard spełniono dopiero później gdy po mniej surowej filtracji analogowej sygnał jest dwukrotnie częściej próbkowany przed ADC i dalej jest filtrowany cyfrowo - programowo !
Filtr Sallena - Keya (1952) nadaje się tylko do filtrów o niedużej dobroci z uwagi na dużą wrażliwość znacznej dobroci Q na odchyłki wartości elementów RC co jest jego podstawową wadą. Pracuje on ze wzmacniaczem nieodwracającym o K>=0.99 ( wzmocnienie nie przekracza w praktyce 2 razy ) czyli w szczególności wtórnikiem emiterowym o wzmocnieniu bliskim 1. Zaletami konfiguracji SK są:
-Prostota
-Małe obciążenia prądem wyjścia "OPA" i niewielkie szumy
-Przy małym Q dla sygnału AC możliwość użycia wtórnika emiterowego na tranzystorze a nie drogiego OPA.
-Z tranzystorem o Ft>5 GHz częstotliwość Wo może przekroczyć 200 MHz w filtrze dolnoprzepustowym gdzie C2 jest równoległy do Cbc tranzystora a on na wejściu (baza Q) rezystancje obciążenia zamienia też w kolejną pojemność.
-Impedancja wejściowa filtru górnoprzepustowego SK jest taka jak stratnego szeregowego obwodu RLC co wykorzystane jest na przykład w equalizerach audio.
-Możliwa jest realizacja przy niewielkim Q prostego filtru III rzędu ( M.Herpy, Analog Integrated Circuits", Akademia Kiado, 1980 )
Regulowane napięciem 0-10V (podanym do prostego modulatora PWM ) równoważne opóźnienie i czas narastania jest bardzo użyteczne na przykład dla symulacji energetycznego kotła przepływowego gdzie czas przepływu jest odwrotnie proporcjonalny do strumienia wody - pary a ten proporcjonalny do oddawanej mocy bloku.
Odpowiedz pętli regulacji z regulatorem PI-PID z tym filtrem III rzędu jako obiektem ( czyli od razu jest to inercja i opóźnienie ) jest dobrą aproksymacją odpowiedzi z realnymi Obiektem inercyjnymi z opóźnieniem ! Szczególnie gdy sygnał pochodzi z Symulatora napędu krokowego.
Symulator napędu krokowego
Stosowane są w automatyce napędy organów wykonawczych - aktuatory pneumatyczne, hydrauliczne i elektryczne. Każdy z nich ma swoje zalety i wady. Zasilacze dla systemu hydraulicznego i pneumatycznego muszą pracować bez przerwy pożerając energie elektryczną. Emitują ciepło. Systemy pneumatyczne są bezpieczne w wybuchowym otoczeniu. Systemy hydrauliczne są szybkie i silne ale jednak brudne.
W krokowym serwonapędzie elektrycznym stosowane są małe dwufazowe silniki asynchroniczne na napięcie 24 Vac oraz większe na napięcie 220 Vac. Stosowane są też jeszcze większe trójfazowe silniki na napięcie 380 Vac. Sterowane są one regulatorami krokowymi. Tam gdzie operacje są częste i przekaźniki / kontaktory bywają zawodne stosuje się jako wyłączniki tyrystory. Serwonapęd ma często potencjometr lub sensor LVDT dające zwrotnie sygnał położenia organu wykonawczego. Gdy nie ma sensorów położenia regulator krokowy pracuje zawsze w systemie odtwarzania położenia.
Organem wykonawczym jest zawór dozujący wodę, paliwo, parę grzewczą i substancje procesowe. Stosowane są też zawory trójdrożne. Ale także krokowo ustawiany jest kąt natarcia łopat wentylatorów i turbin.
Symulator otrzymuje dwa sygnały binarne kierunków ruchu (24 Vdc lub 220 Vac) - krokowe które normalnie są podane do serwo silników. Wytwarza on analogowy sygnał ( R (potencjometr), 4-20 mA / 0-10 V ) położenia tak jak potencjometr lub LVDT w systemie i ewentualnie sygnały przełączników krańcowych położenia.
Do izolacji sygnałów 220/380 V stosuje się transoptory lub przekaźniki.
Odwracający Integrator z kondensatorem foliowym 10 uF jest wykonany na OPA JFet.
Gdy kondensator foliowy jest ładowany w obu kierunkach małym prądem to prosty wtórnik źródłowy jest wykonany z tranzystorem JFet lub Mosfetem
Jaką taką stabilność wykazują dopiero kondensatory elektrolityczne o znacznej pojemności. Konstrukcja symulatora z dobrej jakości miniaturowym kondensatorem elektrolitycznym o małym upływie i pojemności 1000 uF jest bardzo prosta.
Wielokrotne OPA lub małomocowe komparatory LM339/393 (poczwórne / podwójne ) działają z dodanymi na wyjściu tranzystorami jako „krańcówki”. Mają one zadziałać jak najbliżej nasycenia OPA integratora aby minimalizować szkodliwy efekt histerezy. Realny serwonapęd też ma niewielką histerezę.
Literatura
1.Schematy omawianych w tekście symulatorów
2.Szczegółowe omówienia eksperymentów z obszaru automatyki
3.Analog Integrated Circuits, M.Herpy, Akademia Kiado, 1980
W Polsce mamy symulacje demokracji, praworządności, sądownictwa i dobrobytu..
OdpowiedzUsuńW rzeczywistości jest wyzysk, zamordyzm, zaprzaństwo, kołtuństwo, myśl inkwizycji i średniowiecza, Pegasusy, CBA, rozkradanie państwa, w ramach symetryzmu i innych niebanalnych potrzeb.
Polska to Tania Siła Robocza a teraz i kandydat na Mięso Armatnie.
OdpowiedzUsuńWitam. Może unikniemy wojny. Nadzieja umiera ostatnia.
OdpowiedzUsuń