Archiwum. Automatyzacja realna czyli nieznana.12 Sensory indukcyjne
Sensory ( jak zmysły człowieka) dostarczają systemowi informacji o stanie obiektu a aktuatory ( jak mięśnie ) są fizycznymi wykonawcami decyzji. Między nimi jest cyfrowy lub analogowy „komputer” ( regulator PID, PLC, DCS, CNC, komputer z interfejsami ) czyli mózg wypracowujący decyzje. Zresztą komputery nazywano kiedyś elektronicznym mózgiem
Obszerna nauka o sensorach wybija się na Zachodzie na samodzielną dyscyplinę. Za pewnik można uznać że coraz większy będzie udział sensorów wykonanych technologią monolityczną.
Odkrycie tranzystorów jest na chwilę obecną wynalazkiem wszechczasów i to jest proste następstwo tego faktu.
Wiedza miała i ma w gospodarce wielką rolę do odegrania. „Ucz się dziecko ucz, bo nauka to potęgi klucz”.
Dotychczasowe badania nad stagnacją, zacofaniem i rozwojem krajów świata prowadzą do jednoznacznego wniosku że rozwój jest efektem zastosowania we własnym społeczeństwie i własnej gospodarce wiedzy.
Skoro wiemy że oligarchie są złe to je likwidujemy i rozwój może być odblokowany. Tak było ze ścięciem królów Anglii i Francji. To samo uczyniła rewolucja październikowa i także po II Wojnie rewolucja w Polsce odblokowując rozwój.
Wiemy że edukacja jest dobra dla rozwoju i dlatego posyłamy dzieci do szkół. I tak dalej.
Zatem rozwoju nie można zaimportować i kupić. Można importować technologię do dalszego samodzielnego rozwoju. Bez tego dalszego samodzielnego rozwoju pozostają niemożliwe do spłacenia długi za import i kryzys.
Do bogatego „Zachodu” udało się po wojnie dołączyć tylko Japonii i azjatyckim tygrysom. Zatem doganianie Zachodu okazało się mrzonką. Także przez kraje RWPG.
Japonia jest jedynym krajem świata gdzie roboty przemysłowe są już rutynowo stosowane. Cały świat uczy się robotyki na małym edukacyjnym robociku Mitsubishi.
Struktura handlu dobrami handlowalnymi międzynarodowo mechanizmami gospodarki wyznacza poziom dochodu kraju per capita. Skoro tak jak III Świat eksportujemy surowce węgiel i miedz a importujemy drogie towary to zarabiamy 15-20 „czarnorynkowych” ( a innych Kowalski nie ma ) dolarów miesięcznie. To oczywisty skutek takiej kolonialnej gospodarki.
Kompletne elektroniczne sensory ( stosowane szeroko m.in. w przemyśle ) są coraz bardziej masowymi produktami przemysłowymi co prowadzi co ciekawych wniosków.
W okresie pierwszej rewolucji przemysłowej maszyny produkowano w manufakturach które były matkami pierwszej generacji maszyn. Gdy maszyny produkowano w fabrykach (W. Kula, Historia – Zacofanie - Rozwój, Czytelnik, 1983 ) pierwsza rewolucja przemysłowa była już skończona. Zatem w tym schemacie dziejów przemysłowa produkcja sensorów współpracujących z automatyzującymi produkcje i usługi „komputerami” jest zapowiedzią kolejnej rewolucji przemysłowej.
Niestety wszystko co w Polsce jest nowoczesne pochodzi z zakupów zachodniej technologii.
Dotychczasowe próby w świecie modernizacji zakupioną technologią ( W. Kula …) kończą się spektakularną klapą jeśli technologia nie jest przez kupującego dalej rozwijana. Gdy w przeszłości kupujący technologie miał determinacje w badaniach i rozwoju nierzadko szybko przerastał mistrza !
Licencyjny PF 125 był w dacie zakupu licencji niezłym europejskim samochodem ( nie pozbawionym wad ) ale teraz bez głębokiej modernizacji stał się archaikiem. I tak jest ze wszystkim co nabyliśmy na Zachodzie.
Zresztą już wcześniej nie potrafiliśmy w pełni uruchomić produkcji na radzieckiej licencji Warszawy M20 czyli w istocie Forda z drugiej ręki.
Urządzenia i systemy elektroniczne mogą być samodzielne lub wbudowane w większą całość.
Samodzielne są sprzęty RTVC ale w zasadzie kupuje się kompletną wieżę Audio a nie poszczególne jej urządzenia. Jednak radiomagnetofon czy odbiornik TVC są samodzielne ale mogą być (rzadko) połączone z innymi urządzeniami.
Sterownik z mikrokontrolerem wbudowany w pralkę jest totalnie niesamodzielny. Dzięki niemu nowoczesna, atrakcyjna pralka (m.in. polepszona skuteczność prania i wysoka szybkość – skuteczność odwirowania prania ) może być droższa. Nie zmienia to faktu ze nadal jest to pralka tyle że trochę ( ja to ocenić ?, o 10 - 20 % ?) „sprawniejsza”.
Tak samo samochodowy mikrokontrolerowy sterownik wtrysku paliwa i zapłonu jest niesamodzielny. Dzięki temu sterownikowi silnik samochodu ma istotnie lepsze parametry i samochód jest znacznie droższy. Polski Polonez , FSO 1500 i Mały Fiat bez tego komputerka (z towarzyszącymi sensorami ) wkrótce będą wyrobem skansenowym. W sensorach oraz we wtryskiwaczach i cewce zapłonowej jest miedź jako cewki (Sporo miedzi jest w okablowaniu samochodu czyli w wiązkach przewodów ). Nie zmienia to jednak faktu że nadal jest to samochód napędzany silnikiem spalinowym tyle że zużywający <10% mniej paliwa i o lepszym przyśpieszeniu oraz mniej uciążliwy dla środowiska.
Wbudowanej elektroniki jest coraz więcej i więcej, szczególnie w maszynach i urządzeniach przemysłowych. Bez tej elektroniki towary stają się niesprzedawalne jako że nachalne kampanie reklamowe trąbią o tych „rewelacyjnych” nowościach wdrukowując to do świadomości nabywców !
Praktycznie zawsze wbudowana elektronika ma sensory.
W czasie całej II Wojny Światowej zużyto równoważnik blisko 5 mln ton trotylu TNT. Ogromna większość tego materiału wybuchowego nie wyrządziła istotnej szkody. Nawały artyleryjskie przy ofensywach najczęściej „orały” pola. Co innego współczesny precyzyjny pocisk kierowany elektroniką który ma trafić w wielki zbiornik ropy naftowej, w budynek reaktora jądrowego, zaporę wodną, wielki magazyn amunicji, budynek i płytę lotniska, jadący ważny pociąg pociąg albo w wielki transformator stacji energetycznej. „Ilość przechodzi w jakość” Ale tu jest odwrotnie - jakość (celność) przechodzi w ilość (zniszczeń). Tu przyrost funkcjonalności nie jest 10% ale jest ogromny a faktycznie ten kierowany pocisk jest to już inny produkt.
Dla zabicia jednego żołnierza Wietkongu armia USA wystrzeliwała w Wietnamie średnio 40 tysięcy równoważnych pocisków karabinowych ale celny snajper potrzebuje tylko średnio 1.3 pocisku na ofiarę.
Stany Zjednoczone pod koniec II Wojny Światowej stosowały w pociskach przeciwlotniczych elektroniczny ultra nowoczesny wówczas ( po raz pierwszy zastosowano płytkę drukowaną !) przełącznik zbliżeniowy FUSE. Pozwolił on radykalnie zmniejszyć ilość pocisków do zniszczenia jednego wrogiego samolotu. Kolejnym krokiem było sterowanie dział przeciwlotniczych przez radar i komputer ! W efekcie doskonale chroniona flota lotniskowców USA jest obecnie niezniszczalna co daje mocarstwu militarną światową władze.
Największym światowym producentem mikroelektroniki jest Japonia. Przykładowo wytwarza ona około 80% pojemności pamięci RAM. W trwającej ofensywie eksportowej Japonii ta mikroelektronika w ogromnej większości użyta jest w eksportowanych towarach. Przykładowo tylko w Japonii produkowane są znakomite tranzystory mocy do wzmacniaczy Audio ale tranzystory te praktycznie nie są eksportowane i opuszczają Japonię tylko w rynkowych towarach.
Oficjalnie Japonia jest w stanie wojny z ZSRR ale Związek Radziecki kupował w Japonii technologie podobnie jak Polska.
Zwróćmy uwagę na synergiczne sprzężenia zwrotne w systemie gospodarczym. „Bogatemu diabeł dzieci kołysze do snu”. „Bogatemu i byk się ocieli” Te sprzężenia bywają proste i oczywiste ale są też skomplikowane i trudne do dostrzeżenia.
Koncern IBM szybko zastosował swoje komputery w swoim projektowaniu i w swojej produkcji. Automatyczne było m.in. szybkie i bezbłędne „szycie” backplane maszyn cyfrowych. Uzyskana przewaga nad konkurencją była tak wielka że IBM stał się synonimem komputera. Zamiast „komputer” mówiono „IBM” !
Po uruchomieniu przez koncerny mikroelektroniczne produkcji mikroprocesorów i układów peryferyjnych oraz pamięci przewaga (w sprzęcie ) IBM gwałtownie stopniała.
Polska szeroko stosując mikroelektronikę w swojej produkcji może mocno zmniejszyć dystans cywilizacyjny do liderów i odwrotnie porzucając ją zwiększyć dystans.
Indukcyjność liniowa przy danej częstotliwości charakteryzowana jest indukcyjnością i dobrocią. Ze zmianą częstotliwości indukcyjność i dobroć mogę się sporo zmieniać jak na przykład w ferrytach stosowanych na „ferrite beads” czyli perełki ferrytowe. Czasem model realnej indukcyjności złożony z idealnych elementów L,R,C daje bardzo dobrą zgodność z nią. Modele takie są szczególnie istotne w programach komputerowych.
Koncern Hewlett Packard produkuje znakomite, skomputeryzowane ( i drogie ) przyrządy do pomiaru RLCZQD przy różnych częstotliwościach. Umownie granicą częstotliwości radiowych RF jest 1000 KHZ. Na zakresach UHF i dalej mikrofalowych dominują pomiary parametrów „S”
Polski cyfrowy miernik RLC E-318 operuje tylko z częstotliwością 1 KHz i jest szalenie ubogi na tle wspomnianych przyrządów.
Scharakteryzowanie nieliniowej indukcyjności ( tu dla Flux Gate i ubocznie Magnetic Amplifier ) jest trudne a jej sensowny komputerowy model jest zawsze skomplikowany. Konieczna jest odpowiednia Siatka Pojęciowa i normy (najlepiej międzynarodowe IEC ) definiujące sposób pomiaru..
Często nawet do przybliżonego pomiaru własności elementu elektronicznego potrzeba zestawu drogich przyrządów oraz sterującego nimi komputera . Z kolei pomysłowy Dedykowany Układ Testowy jest prosty, dokładny i wiarygodny. Nierzadko takie układy są pokazane w literaturze koncernów mikroelektronicznych.
Produkcje maszyn elektrycznych a w tym mikromaszyn konsekwentnie mechanizowano i automatyzowano w liderujących w technologii USA od lat trzydziestych.
Od początka lat siedemdziesiątych Japonia jest światowym liderem w produkcji małych maszyn elektrycznych a szczególnie silniczków DC. Ogromną produkcje tą zautomatyzowano. Przewaga japońskich koncernów nad konkurencją ze świata jest tu miażdżąca. Obecnie koncerny japońskie powoli przenoszą tą produkcje do krajów Azji.
Także w Polsce jest to technologia ( licencyjna ale nie zautomatyzowana ) opanowana. Ale nie mamy ( nie kupiliśmy ) na przykład technologii uzwajania rdzeni transformatorów toroidalnych mających w części zastosowań wiele zalet. Konstrukcja maszyn do uzwajania toroidów jest względnie prosta ale bardzo pomysłowa.
Przestawianie zachodniego przemysłu z rozgałęzionego centralnego napędu od maszyny parowej na indywidualne napędy elektryczne w maszynach roboczych było dość długie. Silniki elektryczne produkowano wcześnie według indywidualnego projektu dla każdej maszyny nowego projektu. Seryjna, masowa produkcja standardowych rodzin silników przez Westinghouse i General Electric spowodowały upowszechnienie napędu elektrycznego i znaczną redukcje cen. Silnik elektryczny stał się tylko i jednocześnie aż gotowym napędem. Podobnie masowa produkcja standardowych transformatorów do energetyki uprościła i upowszechniła elektryfikacje.
W obu potężnych koncernach już lampowe komputery IBM zastosowano do projektowania i optymalizacji maszyn elektrycznych ! Temat optymalizacji maszyn jest na tyle trudny że prace kontynuowane są do dziś dnia na silnych komputerach.
„Reverse Engenering” udanych nowoczesnych rozwiązań może dostarczyć użytecznych informacji do własnej konstrukcji sensora czy każdej innej rzeczy. Problemem może być ustalenie rodzaju użytych w sensorze materiałów. Zwróćmy uwagę że nawet w banalnym sensorze LVDT przesuwany rdzeń często wykonany jest z permalloyów a w tym specjalnie dedykowanych do LVDT. Rdzeń jest umocowany do łożyskowanego trzpienia ze stali diamagnetycznej lub plastikowego. Domeny magnetyczne stali diamagnetycznej w procesie obróbki skrawaniem na zimno ulegają uporządkowaniu i konieczna jest obróbka cieplna dla przywrócenia własności diamagnetycznych. Metalowa obudowa LVDT winna zapewnić skuteczne ekranowanie i użyty materiał też nie jest obojętny dla uzyskanych parametrów.
Obecnie do projektowania maszyn elektrycznych oraz sensorów indukcyjnych bardzo pomocne są programy komputerowe używające metody elementów skończonych FEM.
Do produkcji sensorów indukcyjnych potrzebny jest izolowany drut miedziany a Polska jest znacznym światowym producentem miedzi ale ośmiesza i hańbi nas eksport surowej miedzi. Dalszy trzecioświatowy eksport surowców doprowadzi Polskę do bankructwa i jeszcze większej biedy.
Miedź po żelazie i aluminium jest trzecim metalem przemysłowym świata. Złomowe żelazo i miedź są powtórnie przetapiane. Rudy miedzi są ubogie zawierając jej tylko 0.5-1 %. Gro rud wydobywa się w świecie odkrywkowo a drogie polskie głębinowe wydobycie jest obecnie nierentowne. Wydobycie rud i produkcją miedzi bardzo obciążają środowisko. Ceny miedzi na rynku światowym są niestabilne ! Na kołysaniu cen i destabilizacji zyskują wielcy spekulanci. Zysk spekulantów to czysta strata odbiorców i producentów. Mówimy tu o potężnym kołysaniu i destabilizacji rynku i całego systemu światowego
Dla ilustracji. Cena miedzi za funt w kwietniu 1974 roku wynosiła 1.38 dolara za funt, w styczniu 1980 roku wynosiła 1.43 dolara za funt a w maju 1982 roku 0.54. A wartość inflacyjnego dolara sporo w tym czasie spadła.
O ile eksport miedzi mógł być dawniej rentowny to jej eksport w 1982 roku w stanie wojennym tylko dobijał Polskę.
Natomiast ceny wyrobów gdzie w dużej ilości używana jest do produkcji miedź zmieniają się o wiele mniej lub wręcz wcale. Rezygnacja z eksportu surowej miedzi na rzecz eksportu wyrobów z jej użyciem znakomicie poprawi sytuacje polskiej gospodarki i trochę ustabilizuje ją
Miedz produkuje też potężny przemysł RFN ale miedzi surowej w ogóle nie eksportuje.
Uboga w surowce jest Japonia kupując je za środki z eksportu. Generalnie jednak zbędne sprzedawanie i kupowanie jest bardzo kosztowne. Jest to handel w obcej walucie przy zmiennych kursach i potężnym kołysaniu rynku przez wielkich spekulantów. Z publikowanych danych wynika że czasem koszty transakcyjne stanowią do 40% całości kosztów w firmach !
Z miedzi produkuje się głównie (>60%) przewody i druty nawojowe. Około 15-20 % służy do sporządzania w przemyśle stopów a z reszty produkuje się rury i armaturę wodociągową oraz poszycia dachów itp.
Na tle drogiej, kapitałochłonnej i energochłonnej produkcji miedzi dewastującej też środowisko naturalne dalsze jej przetworzenie w przewody i druty nawojowe oraz rury i blachy jest proste i tanie !
W ofertach firm działa synergia. Najlepiej transformatory energetyczne (miedź i stal elektrotechniczna) sprzedawać z resztą wyposażenia do stacji energetycznej (także automatyka ) a w przypadku podstacji SN/nN jako prefabrykat lub kontener. Warto też od razu ze stacją sprzedawać tysiącami kilometrów kable WN, SN i nN. W dużym 40 stopowym kontenerze mieści się też podstacja do zasilania napięciem stałym trakcji kolejowej.
Wzorem dla nas jest RFN ale nie obecna ale ta sprzed paru lat !
Nowoczesny eksport Japonii jest formą bezwzględnej wojny ( słowo to ma tu jak najbardziej uzasadnienie ) gospodarczej bowiem blokuje on nowoczesną produkcje ( także związana z tym nauka i projektowanie ) na atakowanych rynkach i niszczy szanse na rozwój atakowanego kraju.
System światowy był i jest ustawiony ( tanie surowce i drogie nowoczesne towary ) przez zachód na jego potrzeby co doskonale wykorzystała Japonia faktycznie niszcząc najnowocześniejszy zachodni przemysł.
Prowadzona przez Japonię i Niemcy wojna gospodarcza obniża jednak poziom wynagrodzeń i poziom życia mieszkańców tych krajów. Choć technologia Japonii stoi na wyżynach to poziom życia nie jest tak adekwatnie wysoki. Zresztą każda wojna obniża poziom życia.
Niemniej idea rozwoju i wzrostu ciągnionego przez eksport generalnie się sprawdza.
Polska ma słabą chemie i petrochemie. Jest bardzo zapóźniona w plastikach ale też w izolacjach drutów. Nawet na tle krajów RWPG.
W obwodach magnetycznych sensorów często stosuje się materiały z niklem, kobaltem i pierwiastkami Ziem Rzadkich. Surowce te i materiały z nich ZSRR sprzedaje tylko za dolary, także krajom RWPG. Sensory są na rynku światowym drogie ale koszty użytych w nich drogich surowców są jednak marginalne.
Jeśli chodzi o części metalowe to wykonanie prototypów wymaga użycia standardowych maszyn poza prasami gdzie konieczne jest też użycie przygotowanych wykrojników i form. W masowej produkcji używa się plastikowych detali wykonanych na wtryskarkach. Ponieważ wykonanie formy wtryskowej jest drogie pojedyncze sztuki detali niby plastikowych można wykonać na przykład wykrawając je z tekstolitu czy nylonu.
Polska literatura w temacie sensorów jest bardzo uboga. Wymienianych jest ledwie kilka sensorów indukcyjnych. Niniejszy sygnalizacyjny przegląd siłą rzeczy jest bardzo skrótowy.
W rozwiązaniach "ortodoksyjnych" elektroniczny kondycjoner sensora - stricte ma wypracować standardowy w systemie sygnał analogowy lub cyfrowy. Sygnały te przesłane przewodem są dalej przetwarzane analogowo lub wbudowanym mikrokontrolerem lub komputerem.
Niemniej sensor-stricte od razu może być elementem systemu przetwarzania sygnałów i informacji wprowadzając tam też swój "pomiar" i przetwarzając inne dane i sygnały. Oczywiście stworzenie - wymyślenie takiego układu jest bardzo trudne ale pozwalało oszczędzić na ilości stosowanych elementów co było konieczne aby skomplikowany system w ogóle mógł być produkowany po sensownej cenie i niezawodności. Gdy niemiecki koncern Bosch w 1967 roku wypuścił pierwszy w świecie elektroniczny system wtrysku paliwa musiano bardzo oszczędzać drogie elementy elektroniczne. Indukcyjny, impulsowy ( czyli nie ciągły ) sensor ciśnienia włączony jest do układu gdzie wraz z innymi sensorami i sygnałami wypracowany jest sygnał z potrzebną kombinacją informacji. Działanie tego systemu DJetronic jest opisane w literaturze, także polskojęzycznej i stąd powtarzanie informacji jest niecelowe.

1.Resolver
2.Linear Variable Differential Transformer
3.Indukcyjne sensory quasi mostkowe i pochodne LVDT.
4.Flux Gate i MA
5."Flux Gate" impulsowa
6.Binarny Sensor Zbliżeniowy
7.Sensor Magnetostrykcyjny
8.Cewka Rogowskiego
9.Głowice do zapisu i odczytu magnetycznego
10.Mikrofon Dynamiczny i sensor ruchów Ziemi
11.Antena ferrytowa
12.Sensory do defektoskopii wiroprądowej
13.Pętle indukcyjne "Traffic sensor"
14.Cewki - anteny w urządzeniach Nuclear Magnetic Resonance.
15. Elektromagnes w "Elektromagnetic Flow Meter"
16."Search coil magnetometer"
17.Pick Up Coil
18. Metal detector / finder
19."Waga Prądowa"
1.Resolver (selsyn) to mikromaszyna ( Współcześnie z reguły zintegrowana z silnikiem elektrycznym serwonapędu. Obie maszyny są z grubsza wykonane tą samą technologią co jest sporą zaletą organizacyjną oszczędzającą koszty ) z uzwojeniami kwadraturowymi stojana SIN i COS oraz uzwojeniem rotora ( bezszczotkowy z transformatorem ) , która obecnie głównie służy do precyzyjnego cyfrowego pomiaru kąta w maszynach CNC i robotach przemysłowych ale nie tylko tam. Z uzwojeniem trójfazowym stojana jest to Synchro ale w języku polskim dalej selsyn. Czyli słowo selsyn jest niejednoznaczne. Induktosyn jest rozwinięciem liniowym Resolvera. Stosowany jest cyfrowy pomiar fazy, amplitudowy pomiar próbkowany przez ADC i amplitudowy pomiar ciągły ze śledzącym obserwatorem. System z obserwatorem ( Układ hybrydowy Analog Devices o rozdzielczości 14 bit kosztuje około 400 dolarów ale ceny spadają. Podobne ceny ma konkurencyjny Burr Brown ) mierzy też od razu prędkość co jest wielką zaletą przy użyciu w serwomechanizmie CNC lub robota i w prędkości może być kilkanaście razy dokładniejszy (dużo mniejsze są szumy ) ale system z obserwatorem jest skomplikowany i drogi.
Serwomechanizmowe silniki BLDC często mają wbudowane sensory Halla dostarczające Inverterowi zasilającemu silnik informacji do komutacji faz. Gdy z silnikiem zintegrowany jest resolver „on” (jego interface ) może dostarczać tej informacji i sensory Halla są zbędne. Oczywiście nie może być żadnego mechanicznego przesunięcia faz między silnikiem i resolverem i musi być zgodność ilości par biegunów. Zalety integracji stają się oczywiste a koszt resolvera bez łożysk i osobnej obudowy jest niewielki.
Największy w świecie producent sterowań do maszyn CNC i robotów Fanuc - ma do współpracy z resolverem w swoich systemach swój własny, niekomercyjny ( wzmiankowana już polityka eksportowa Japonii ) chip w obudowie DIP40. Nic o nim bliżej nie wiadomo a ze schematu układu z nim niewiele wynika.
Dojrzałe resolvery oraz elektronikę do nich produkuje tylko 6 krajów świata.
Do niedawna resolver pełnił też role przelicznika ( od jego kąta ) w złożonej elektronice analogowej, szczególnie militarnej. Obecnie czołg bez nowoczesnego i skomplikowanego Układu Kierowania Ogniem ( a w tym serwomechanizmy armaty i resolvery) jest tylko celem do odstrzelenia na polu walki. Bardzo celny pocisk ( z dużej armaty lub rakietowy odpalony z morza, lądu i powietrza ) może wyrządzić ogromne szkody wrogowi. I tak dalej.
„Praca” wykonywana przez roboty przemysłowe ma być konkurencyjna dla pracy ludzi. Przy wynagrodzeniach na poziomie 15-20 dolarów („czarnorynkowych” ale innych realnie nie ma ) miesięcznie robotyzacja jest ekonomicznym nonsensem tak samo jak użycie maszyn CNC.
2. Linear Variable Differential Transformer jest specyficznym transformatorem różnicowanym używanym do pomiaru przemieszczeń liniowych. Ma stosunkowo małą nieliniowość i jest dość stabilny. W wykonaniach specjalnych LVDT pracują w dość wysokich temperaturach, z silnym promieniowaniem X i jądrowym oraz przy znacznym ciśnieniu i w środowisku agresywnym.
Na zachodzie LVDT są oferowane jako niedrogi produkt katalogowy. Produkowanych jest kilka rodzin LVDT w ramach których każda ma wiele LVDT o różnych długościach związanych z zakresem maksymalnego pomiaru. Popularna jest amerykańska firma Schaevitz Engineering. W Polsce LVDT oznaczone jako PDs 10, 20, 50, 100 ( liczba w oznaczeniu to pełen zakres pomiarowy czyli 100 to przesunięcie +-50 mm ) oferuje Instytut Lotnictwa w Warszawie. Parametry są co najwyżej przeciętne ( liniowość <1 %) a cena jest horrendalna. Nie jest to zatem wyrób masowy ale w istocie rzemieślniczy. Zalecana częstotliwość pracy ( zasilania ) wynosi 5 KHz a napięcie nominalne zasilania 2 V ale możliwe jest do 10 V. Pełne napięcie wyjściowe wynosi 0.5 V/V.
Transformator taki ma trzy cylindryczne uzwojenia rozmieszczone wzdłuż a w cylindrze porusza się ferromagnetyczny prętowy rdzeń. Środkowa cewka (uzwojenie pierwotne) o położeniu symetrycznym jest zasilana prądem lub napięciem zmiennym, z reguły o częstotliwości 1-10 KHz ( często 2.5 KHz ).
Koszt produkcji sensorów LVDT bardzo mocno zależy od jej wielkości. Już przy średniej wielkości przemysłowej produkcji LVDT nie jest drogi. Znów występuje mechanizmy synergii.
Stabilny temperaturowo i dlugoczasowo karkas uzwojenia LVDT jest wykonany z Nylonu 6 lub 66 ( lub lepszych tworzyw ) z włóknem szklanym. Długi karkas jest sekcjonowany z uwagi na stabilność mechaniczną ułożenia uzwojenia. Naprężenie drutu nawojowego winno być niewielkie ale stabilne aby nie doprowadzić do płynięcia i odkształcenia materiału karkasu ale wystarczające do równego i powtarzalnego ułożenia drutu uzwojenia. Stosujemy drut samospiekający się lub odpowiednia zalewę.
W położeniu środkowym napięcie wyjściowe z szeregowo połączonych uzwojeń wtórnych jest bliskie zeru a po obu stronach Zera położenia rdzenia faza sygnału zmienia się z 0<->180 stopni. Sygnał jest obecnie podany do detektora synchronicznego, który oprócz amplitudy korzysta z informacji o fazie dając z niej znak napięciu wyjściowemu DC. Zaletą tego rozwiązania jest odporność na zakłócenia, które są skutecznie eliminowane detektorem synchronicznym. Alternatywnie każde z uzwojeń wtórnych ma prostownik a wyjścia prostowników są połączone dając sygnał wyjściowy ze znakiem. Gdy prostowniki są przy sensorze LVDT nie ma zakłóceń i potrzeby ich tłumienia. Dokładność diodowych prostowników jest zwykle znacznie gorsza niż detektora synchronicznego.
LVDT zyskały dużą popularność w produkcyjnych urządzeniach przemysłowych ale także w urządzeniach kontrolnych do pomiaru przesunięć. Stosowane są także w analogowych aktuatorach na przykład do kontroli stopnia otwarcia przepustnicy silników pojazdów i samolotów.
Produkowane są monolityczne układy scalone obsługujące LVDT o przyzwoitej dokładności.
3.Indukcyjne sensory quasi mostkowe i pochodne LVDT. Najmniejsze pełne skale sensorów LVDT przekraczają 10 mm. Rurka Bourdona w manometrze / sensorze ciśnienia nie daje tak dużego przesunięcia.
W jednym z rozwiązań sensora indukcyjnego szczelina między połówkami ferrytowego kubka o średnicy 18 mm wynosi 2 mm. Kubek jest stabilnie skręcony z niemagnetyczną podkładką na środkowej kolumnie ale o średnicy mniejszej od kolumny. Każda połówka kubkowego rdzenia ma swoje uzwojenie. W szczelinie kubka porusza się okrągła blaszka o średnicy 18 mm z permalloyu z otworem dla wspomnianej przekładki wyznaczającej szczelinę. Blaszka jest poruszana przez rurkę Bourdona zamykając / otwierając obwody w indukcyjnościach na połówkach kubka i zmieniając jednocześnie ich indukcyjności. Uzwojenia połówek kubka połączone są szeregowo i zasilane napięciem zmiennym o częstotliwości około 5 KHz z dedykowanego uzwojenia generatora LC. Mogą być jednym ramieniem mostka AC ale w sensorach napięcia z uzwojeń podane są do diodowych prostowników. Prostowniki pracują antyszeregowo jak w dyskryminatorze FM ( jak w pokazanym już schemacie blokowym sensora ciśnienia ) lub wyjścia prostowników o różnych biegunowościach są sumowane rezystorami jak w detektorze stosunkowym FM. Pierwsze rozwiązanie daje większy wyjściowy sygnał napięciowy o stabilniejszym zerze a drugie jest bardziej liniowe. Jest zatem identycznie jak w dyskryminatorze FM i detektorze stosunkowym FM mimo różnych funkcji i dziedzin pracy. Z uwagi na zależne od temperatury spadki napięć na diodach czułość sensora stabilizuje się zmieniając z temperaturą napięcie zasilającego generatora LC lub zmieniając termistorem NTC wzmocnienie toru sygnałowego.


Rtęć przewodząca prąd elektryczny mieści się w zbiorniczku z materiału izolacyjnego. Przez otwory w tym zbiorniczku przechodzą rdzenie obwodów magnetycznych z uzwojeniami. W stanie równowagi przetwornika czyli w poziomie prądy wirowe w obwodach są sobie równe. Przy odchyleniu od poziomu zmieniają się poziomy cieczy i zmieniają się prądy wirowe co prowadzi do powstania różnicowych sygnałów wyjściowych.
Maszyny torowe służą do układania torowiska i późniejszego jego remontu / konserwacji. Maszyny mają układy pomiarowe. Wykonują m.in. stabilizacje podsypki, czyszczenie, zagęszczanie, podbijanie tłucznia.
Importowane maszyny torowe szwajcarskiej firmy Matisa i austriackiej firmy Plasser są strasznie drogie i stąd motywacja do opracowania polskich maszyn.
Układ do współpracy z tym sensorem odchylenia od poziomu jest generalnie taki jak do sensora LVDT - generator sygnału sinusoidalnego i detektor fazy. Niestety użyty układ elektroniczny ma słabe parametry a jest mocno skomplikowany.

4.Zjawisko nasycenia rdzenia ferromagnetycznego wykorzystywane jest w transduktorach, szybkodziałających wzmacniaczach magnetycznych Rameya i w sensorach pola magnetycznego / prądu Flux Gate.
Flux Gate czyli sensor transduktorowy o dużej czułości (dalej jest mowa o impulsowych FG) służy do pomiaru pola magnetycznego ( prostokątna para FG jest w kompasie do nawigacji ) lub wolnozmiennego prądu. Czułość FG o odpowiedniej konstrukcji może być ekstremalnie wysoka. Ważne są parametry nasycanego materiału użytego na rdzeń. Odpowiednie permalloye dają bardzo dobre rezultaty. FG magnesowana - nasycana jest jednym uzwojeniem symetrycznym sygnałem o częstotliwości F. Sygnał wyjściowy z FG proporcjonalny do mierzonego pola magnetycznego ( jest zniekształcony ) pochodzący z drugiego ortogonalnego uzwojenia ma dominującą częstotliwości 2 F drugiej harmonicznej. Jest po wzmocnieniu podany poprzez opcjonalny ( znacznie polepsza czułość i zmniejsza szumy ale trochę zawęża pasmo sensora ) filtr środkowoprzepustowy do detektora synchronicznego przy czym ważne są relacje fazowe podanych detektorowi sygnałów. Obecnie dla uzyskanie pary sygnałów F i 2F w fazie stosowany jest podział częstotliwości przerzutnikiem D/T a dawniej odwrotnie stosowano jej podwojenie. Schemat we wspomnianej Nocie Aplikacyjnej NSC należy traktować jako idee a nie schemat ideowy. Najczęściej odfiltrowany dolnoprzepustowo sygnał z detektora fazowego jest podany do dodatkowego uzwojenia kasującego w FG mierzone pole magnetyczne.
N/B. Taki układ z nadążnym kasowaniem mierzonego pola jest też stosowany z Hallotronem. Zaletą takiego systemu jest duża dokładność i stabilność bowiem sensor detekuje tylko sygnał nierównowagi i jego liniowość jest bez znaczenia . Kolejnym zastosowaniem kasowania w innym obszarze jest "Waga Prądowa"
Kompas z Fluxgate i Żyrokompas są w pełni komplementarne. Kompas Fluxgate dostarcza stabilny sygnał kierunku na długim dystansie ( ale jest podatny na anomalie pola magnetycznego ) a żyrokompas jest dokładny na krótkich odcinkach względnie dobrze tolerując znaczne przyśpieszenia. Na dużych wysokościach gdzie występują zniekształcenia pola magnetycznego informacje z żyrokompasu pomagają skorygować odczyt z kompasu fluxgate.
Przyrządem koncernu HP 428/428A/428B opartym o Flux Gate można izolowaną sondą pomiarową mierzyć prąd stały DC płynący przewodami ( także ścieżką obwodu drukowanego ) w zakresie od miliamperów do amperów.
Przyrządy HP często nie mają sobie równych. Znajdują także zastosowania m.in. kosmiczne, militarne i infrastrukturalne. Wyrafinowane atomowe wzorce czasu i częstotliwości koncernu HP są popularne na całym świecie. Elektronika tych wzorców jest znakomita ale nawet autor widzi możliwość jej ulepszenia. "Physics Package" tych wzorców jest względnie łatwy do naśladowania.
Krotko omawiany zmodernizowany lampowo - tranzystorowy przyrząd HP-428B pochodzi z 1962 roku ! Przyrząd lampowy 428 pochodzi z 1958 roku. Kolejne wersje przyrządów (pokazany schemat 428a jest z 1960 roku ) są wykonane w coraz nowszej technologii i mają coraz lepsze parametry. Wykonanie sondy pomiarowej jest względnie proste.
Kluczem do uzyskania tu wysokich parametrów jest odpowiedni symetryczny sygnał nasycający rdzeń sensora oraz konstrukcja samej Flux Gate. Sygnał odbierany z idealnej FG bez mierzonego pola magnetycznego powinien być całkowicie pozbawiony drugiej harmonicznej a jego resztki są w przyrządzie kompensowane.
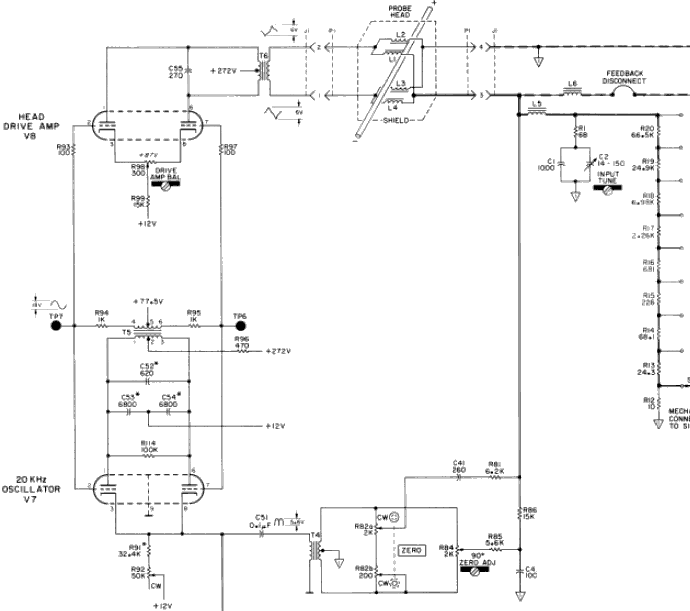
Siatki lampy V7 generatora są połączone z siatkami stopnia wzmacniającego „mocy” na podwójnej triodzie V8. Dodatkowo potencjometr umieszczony w katodach V8 umożliwia bardzo dokładną symetryzacje.
Doskonale widać tu podobieństwo z opisanym systemem różnicowego pojemnościowego sensora kąta gdzie także użyto dwóch par różnicowych o połączonych bazach. Dobroć wyjściowego obwodu rezonansowego umieszczonego w obwodzie anod jest niewielka głównie po to aby zapobiec dryftowi termicznemu i długoczasowemu przesunięciu fazy.
Sygnał wyjściowy z Flux Gate podany jest do liniowego wzmacniacza-filtru selektywnego (szerokość pasma decyduje o szerokopasmowości przyrządu) i dalej detektora synchronicznego wraz z kluczującym sygnałem o podwójnej częstotliwości w stosunku do sygnału nasycającego rdzeń sensora. Użycie detektora synchronicznego jest koniecznością bowiem zawsze istnieje przeciek z obwodu nasycającego o częstotliwości F do wyjścia a także potrzebny jest znak pola -prądu. Także zakłócenia długofalowymi stacji radiowym w urządzeniach o wyższej częstotliwości pracy są eliminowane dzięki detekcji synchronicznej.
Ponieważ czułość Flux Gate jest zmienna w funkcji temperatury i niezbyt stabilna długoczasowo, system pracuje jako układ nadążny. Sygnał wytworzony w detektorze synchronicznym podany jest do całkującego regulatora I który dodaje do uzwojenia pomiarowego prąd DC. Wytwarza on pole magnetyczne o przeciwnym znaku do mierzonego pola magnetycznego. Dzięki temu dryft czułości Flux Gate i wzmocnienia toru pomiarowego są bez znaczenia. Znów widać analogie do nadążnego systemu pomiarowego z sensorem pojemnościowym.
Cześć wzmacniacza operacyjnego regulatora całkującego I wykonano na tranzystorach. W 1962 roku całość przyrządu mogła i powinna być wykonana na tranzystorach ale znów zaważyły anachronizmy (a może chęć stosowania sprawdzonych już rozwiązań i strach przed nowościami) z wcześniejszych urządzeń. HP stosował już wtedy tranzystory epitaksjalne o Ft dochodzącym do 1GHz.
W nowoczesnym rozwiązania częstotliwości nie powielamy x2 ale odwrotnie - dzielimy ją przerzutnikiem.




Na pokazanym fragmencie schematu radzieckiego falownika "Razmer 2" sygnał z wyjścia impulsowego wzmacniacza mocy z tranzystorami V9, V10 poprzez dławik L5 podany jest do drugiego uzwojenia sensora prądu na rdzeniu toroidalnym. Drugi koniec uzwojenia dołączony jest do rezystorów pomiarowych R2,R6 ( napięcie na nich jest sygnałem wyjściowym ) przez które płynie prąd uzwojenia. Przez rdzeń toroidalny ( może być dość mały ) przeprowadzono izolowany przewód przez który przepływa fazowy prąd wyjściowy falownika. Prąd ten zostanie skompensowany prądem wymuszanym przez komparator ( to odpowiednik układu LM311 ) sterujący tranzystorowym wzmacniaczem mocy w klasie D.
Gdyby scalić w układzie CMOS elektronikę to sensor prądu może być konkurencyjny do sensora z efektem Halla. Jest prostszy i dokładniejszy ale pomiar wnosi kłopotliwe znaczne pulsacje prądu. Co gorsza pulsacje ma też mierzony wyjściowy prąd z invertera PWM. Drogą znacznej komplikacji układu można je zmniejszyć czyli realnie jest to wykonalne tylko w implementacji monolitycznej CMOS. Sensor Flux Gate jest znacznie stabilniejszy i dokładniejszy od sensora Halla.
NB. Falownik "Razmer" do sterowania serwo - silnika asynchronicznego zawiera bardzo duża ilość typowych elementów elektronicznych i cena jego musi być bardzo wysoka.

Zjawisko nasycenia rdzenia wykorzystuje się w szybkodziałającym wzmacniaczu ( Magnetic Amplifier = MA) magnetycznym Rameya. W swoim czasie jako wzmacniacz mocy miał on tak duże znaczenie że patent utajniono na kilka lat. Stracił na znaczeniu wraz z rozpoczętą produkcją tyrystorów ale nadal jest popularny. W układach mocy górna częstotliwość pracy nie przekracza 50 KHz
W układzie demonstracyjnym wzmacniacza z żarówką dioda w szereg z regulacyjnym potencjometrem jest zbędna i pokazano ją dla jasności czyli dla dydaktyki.
Podobne jak w sensorze FG rodzaj użytego materiału rdzenia ma duże znaczenie.


MA Rameya zastosowano też w zasilaczu impulsowym sporej mocy nowoczesnego sterowania CNC dla maszyn od lidera Fanuc.


N.B. Prąd odsycający w MA Rameya w urządzeniach do średniej mocy dostarcza liniowy element natomiast w rozwiązaniach dużej mocy stosuje się sterowany fazowo klucz lub pseudo klucz aby mocno zmniejszyć straty mocy choć ich wpływ na sprawność MA nie jest duży.

6.Binarny Sensor Zbliżeniowy ma indukcyjność dla generatora LC wykonaną na otwartej połówce ferrytowego rdzenia kubkowego. Dla kompatybilności elektromagnetycznej częstotliwość oscylacji jest często w przerwie między końcem radiowych fal długich a początkiem fal średnich. Zbliżenie metalowego przedmiotu do otwartego rdzenia sensora powoduje skutkiem prądów wirowych, spadek dobroci indukcyjności i zerwanie drgań co sygnalizuje wyjściowy sygnał sensora.
Celowa jest silna zależność prądu średniego ( DC ) tranzystora generatora od amplitudy generacji i "skokowa" charakterystyka narastania i zerwania oscylacji. Tranzystor bez oscylacji pracuje z małym prądem kolektora i zmniejszonym wzmocnieniem. Zatem rozpocznie generować z dużą dobrocią indukcyjności na rdzeniu kubkowym. Generując pracuje ze znacznie większym prądem i wzmocnieniem i przerwanie generacji nastąpi z histerezą po spadku dobroci indukcyjności. Dla detekcji szybkich sygnałów ( wzbudzanie i gaśnięcie drgań w obwodzie LC jest przecież względnie powolne ) trzeba jednak użyć przerzutnika Schmidta wykonanego tu na dwóch tranzystorach PNP.
Zastosowań Sensora Zbliżeniowego jest cała masa ale jest to osobny temat o dużym znaczeniu praktycznym w automatyzacji procesów produkcyjnych. Potrzebna jest edukacja w temacie ! Autor naliczył w przemyśle i usługach 18 zastosowań indukcyjnego sensora zbliżeniowego ale z pewnością jest ich więcej.
Układ z 4 tranzystorami jest prosty ale produkowane są dedykowane do takiego sensora układy scalone w obudowie DIP8 lub SMD i z nimi elementów jest jeszcze odrobinę mniej. Produkcja tych IC ma zatem sens tylko w dużej gospodarce jak w Japonii czy Niemczech Zachodnich. Rozmiary tego układu z 4 tranzystorami SMD ( obudowa SOT23 ) i elementami biernymi SMD są bardzo małe. N.B. Obecne miniaturowe elementy do montażu powierzchniowego SMD (Surface Mounted Device) niedawno nazywano elementami do układów hybrydowych. Elementy w małej obudowie SMD z tym samym chipem co w klasycznej obudowie bywają już tańsze !

Magnetostrykcja (szkodliwa jako buczenie transformatorów sieciowych ) jest użyta w promienniku generatora ultradźwięków. Na przykład w myjce czy zgrzewarce ultradźwiękowej.
8.Bezrdzeniowa Cewka Rogowskiego (=CR) służy do pomiaru dużych prądów zmiennych. W stosunku do podobnego wyglądem ale cięższego Przekładnika Prądowego (PP) na rdzeniu toroidalnym nasadzonego na przewód prądowy nie ma ona rdzenia. Sygnał z CR należy scałkować, w najprostszym razie niedoskonale obwodem RC. System elektroniczny musi tolerować potężne prądy zwarcia w mierzonym obwodzie a CR się nie nasyca i stąd realizacja owego całkowania i zabezpieczeń nie jest prosta. Tak jak i przekładnik z rdzeniem nie nadaje się ona do pomiaru prądu stałego.
Zwraca uwagę taniość i prostota konstrukcji PP i CR umieszczonych na podstawach izolatorów potężnego transformatora energetycznego 400 KV ( w ogólności NN) w stosunku do samodzielnego PP i CR. Przemawia to za integracją PP i CR z maszynami elektrycznymi.
9.Stałe Głowice audio w magnetofonie i wirujące Głowice video w magnetowidzie. Głowice w dyskach twardych HD nie dotykające powierzchni dysku i głowice w dyskach elastycznych FD.
Przy małych częstotliwościach w tranzystorach bipolarnych dominują prądowe szumy 1/f ( patrz wykresy dla tranzystora 2N5087 ). Częstym błędem jest zastosowanie na wejściu wzmacniacza magnetofonu kondensatora o zbyt malej pojemności co skutkuje dużymi szumami 1/f.
10.Mikrofon Dynamiczny i sensor ruchów Ziemi na niskie częstotliwości.
Przy małych częstotliwościach w tranzystorach bipolarnych dominują prądowe szumy 1/f. Częstym błędem jest zastosowanie na wejściu wzmacniacza kondensatora o zbyt małej pojemności co skutkuje dużymi szumami 1/f.
11.Antena ferrytowa na fale długie, średnie i początek fal krótkich odbiera składową magnetyczną pola fal radiowych. Jest indukcyjnością w selektywnym strojonym kondensatorem wejściowym (także diodą pojemnościową ) obwodzie LC odbiornika. Jej zaleta jest kierunkowość i mała czułość na zakłócające pole elektryczne. Daje o wiele lepszy odbiór niż antena prętowa. "Zwykłe" anteny raczej nie są sensorami indukcyjnymi.
12.Sensory do defektoskopii wiroprądowej są stosowane do ujawnienia wad materiału jak mikropęknięcia. Kolejowa maszyna torowa ( może być skomputeryzowana ) przy wolnej jeździe może wyszukiwać miejsca gdzie szyny są uszkodzone. Można też egzaminować spawy na odpowiedzialnych rurociągach w budowanej i remontowanej elektrowni jądrowej.
13.Pętle indukcyjne (rozmiar circa 1.7 x 2 m, często 5-8 zwoi ) umieszczone w drodze czyli "Traffic sensor" pracujące w generatorze LC detekują obecność samochodu nad pętlą. Gdy nad pętla jest samochód ( prądy wirowe w karoserii ) trochę spada amplituda oscylacji i trochę zwiększa się częstotliwość oscylacji tego generatora LC.
Częstotliwość pracy generatora LC wybieramy taką aby zmiany amplitudy i częstotliwości były jak największe. Z reguły jest to 40-50 KHz. Foliowa pojemność C obwodu LC generatora powinna mieć dużą dobroć. Z uwagi na długie i narażone na silne zakłócenia połączenia ( piorun, zwarcia w sieci energetycznej, trakcja tramwajowa i kolejowa ), generatora LC i dalsze systemy muszą być bardzo dobrze chronione przed potężnymi przepięciami bowiem przy słabej ochronie żywotność systemu jest bardzo mała. Im dłuższe są połączenia (mają szeregową indukcyjność ) tym mniejsze są niestety zmiany napięcia i częstotliwości generatora LC przy obecności pojazdu nad pętlą. Poziom generacji nie może być za duży (< 40 mW ) bowiem przecież pętla jest anteną nadawczą.
Do ochrony przepięciowej używamy w elektronice na przyłączeniu przewodu pętli warystorów, spark gap czyli iskrownika oraz neonówki. Tranzystor generatora LC winien być na spore napięcie (>100 V ) i prąd kolektora 500-1000 mA . Na przykład tanie BC639/640 w obudowie TO92 lub mocniejsze. Ale i tak chronimy jego złącze B-E diodą.
W czasie testu odporności ( Uwaga na Wymogi bezpieczeństwa ! ) na przyłączeniu kabla pętli rozładowujemy kondensator lampy błyskowej 800 uF naładowany do napięcia >300 Vdc magazynujący ponad >36 J energii. Prąd impulsu testowego przekracza 600 A. Po wielu takich potencjalnie destruktywnych impulsach częstotliwość i amplituda oscylacji nie może ulec żadnej zmianie.
Temperatura drogi w której umieszczona jest pętla i przewód połączeniowy decyduje o rezystancji i tym samym dobroci Q obwodu LC. Dobroć ma wpływ na amplitudę drgań i mniejszy na częstotliwość drgań. Z tego względu stosuje się kompensacje od temperatury otoczenia.
Znaczna część systemów stosowanych w świecie nie pracuje poprawnie.
Są stosowane trzy rozwiązania:
-Wykorzystujemy spadek amplitudy oscylacji generatora LC. Wyprostowany i odfiltrowany sygnał podajemy do decyzyjnego komparatora lub przetwornika A/D mikrokontrolera.
-Wykorzystujemy wzrost częstotliwości oscylacji generatora LC. Używany licznik musi być odczytywany co circa 1 ms i algorytm określa chwilowy wzrost częstotliwości. Można też użyć prostego przetwornika F/V i dalej komparatora lub ADC.
-Wykorzystujemy razem informacje o spadku amplitudy drgań i wzroście ich częstotliwości.
"Traffic sensor" daje cenne informacje do adaptacyjnego systemu kierowania ruchem drogowym.
Progi detekcji pojazdów powinny być ustawiane potencjometrami lub przyciskami obsługiwanymi przez mikrokomputer. Koniczne jest dla pamiętania nastaw użycie pamięci nieulotnej. Operator obserwując zapalanie się kontrolnego LEDa i ruch pojazdów powinien właściwie ustalić progi działania systemu aby pojazdy nie były gubione ale też zmiany pogody i pojazdy z sąsiednich pasów ruchu nie generowały fałszywych zadziałań. Rozwiązaniem przyszłości jest inteligentny adaptacyjny, uczący się algorytm detekcji
Taki sensor może też sygnalizować które miejsca parkingowe w zautomatyzowanym wielopoziomowym parkingu są zajęte.
14. Cewki - anteny w urządzeniach Nuclear Magnetic Resonance. W spektroskopach rezonansu magnetycznego i skanerach rezonansu magnetycznego specjalnej konstrukcji cewka odbiera pole magnetyczne w zakresie częstotliwości 30-150 MHz. Odkrycia z zakresu rezonansu magnetycznego mają już swoje lata ( nagrody Nobla z 1944 i 1952 roku ) ale urządzenia są bardzo trudne konstrukcyjnie i coraz lepsze.
15. W "Elektromagnetic Flow Meter" elektromagnes zasilany prądem o częstotliwości kilkunastu Hz wytwarza w rurze zmienne pole magnetyczne w którym w płynącej cieczy powstaje napięcie (<<1mV) proporcjonalne do prędkości przepływającej cieczy rejestrowane na ściankach rurociągu elektrodami. Napięcie to po wzmocnieniu podane jest do detektora synchronicznego i filtru dolnoprzepustowego.
16.Magnetometry z cewką szukająca czyli "Search coil magnetometer" lub "Search coil" używane są w przestrzeni kosmicznej do badania fal elektromagnetycznych w plazmie i do badania naturalnych fal elektromagnetycznych na Ziemi. Metody magnetotelluryczne ( z nadajnikiem a trzy cewki - sensory odbiorcze na zakres 1 Hz - 10 kHz rozmieszczone są w różnych płaszczyznach) służą do rozpoznawania głębokich struktur surowców a w tym ropy naftowej. Badanie poszukiwawcze jest nieinwazyjne, szybkie i tanie.
17.Pick Up Coil czyli sensor reluktancyjny stosowany jest masowo w systemie elektronicznego zapłonu ( także wtrysku paliwa ) samochodowego silnika benzynowego i w układzie pomiaru obrotów silnika Diesla. Alternatywnie użyte są sensory Halla lub indukcyjne sensory zbliżeniowe z generatorem LC.
Nowoczesna domowa pralka automatyczna ma napęd regulowanym silnikiem uniwersalnym. Inteligentnie się rozpędza według programu tak aby bielizna dobrze rozłożyła się w bębnie w czasie wirowania. Uzyskuje się wirowanie do 1000 obrotów na minute i dobrze odwirowanie pranie po którym suszenie jest dość krótkie. Sensorem obrotów silnika jest bardzo prosty w budowie, niewielki Pick Up Coil zintegrowany z silnikiem uniwersalnym ( wspomniano już o integracji resolvera z silnikiem serwomechnizmu ) i współpracujący bezpośrednio z układem scalonym sterownika fazowego dla regulowanego silnika uniwersalnego pralki.
Na schematach pokazano współprace Pick Up Coil z samochodowym zapłonem elektronicznym na elementach dyskretnych i z układem scalonym.
N.B. Przeszkodą w zastosowaniu zapłonu elektronicznego w krajowych samochodach jest brak wykonawczego wysokonapięciowego tranzystora Darlingtona mocy produkowanego zmodyfikowaną technologią niedostępną w krajach RWPG.


Udany "Polish mine detector" z 1941 miał oscylator akustyczny LC (częstotliwość pracy około 3 KHz ) z dwoma odległymi słabo sprzężonymi cewkami nadawczą i odbiorczą i prądy wirowe szukanych przedmiotów wpływały na amplitudę i częstotliwość drgań generatora. Rezonansowa odbiorcza Cewka Szukacza na wejściu wzmacniacza jako obwód LC miała około 35 cm średnicy a nadawcza cewka połączona równolegle ze słuchawkami na wyjściu wzmacniacza była niewielka rozmiarem.
Lata pięćdziesiąte przyniosły znacznie lepszą konstrukcje z BFO ( Beat Frequency Oscillators ) z dwoma prawie identycznymi ( najlepiej ) schematem oscylatorami. Pierwszy zaburzany prądami wirowymi w przedmiotach pracuje z dużą cewką szukacza a drugi pracuje ze standardową małą wymiarem ( można użyć gotowych indukcyjności jak krajowe 7x7 ) stałą indukcyjnością. Sygnały z obu generatorów podano do mieszacza a z niego do słuchawek operatora i czasem układu wskazówkowego miernika. Wybór częstotliwości pracy i rozmiaru cewki szukacza jest istotny.
Niektóre rozwiązania (3-4 tranzystory ) są bardzo proste. Na rysunku pokazano trochę bardziej skomplikowany ale mierny szukacz. Częstotliwość pracy generatorów LC wynosi około 700 KHz. Cewka sensora ( 16 zwoi z ekranem elektrostatycznym dla zapobieżenia zmianom częstotliwości od zmian położenia ciała operatora ) ma średnice 16 cm.

Szukacz VLF, Very Low Frequency, pracuje na niskiej częstotliwości w układzie nadajnik sygnału sinusoidalnego - odbiornik. Gdy w polu cewki nadawczej będzie metal, to odsunięty ortogonalny układ odbiorczy odbierze zakłócony sygnał pola.
Projekty takich szukaczy są publikowane w zachodnich czasopismach amatorskich i półprofesjonalnych. Stale przybywa patentów z tego obszaru ale parametry w zasadzie nie ulegają poprawie.
19."Waga Prądowa" W sensorze ciśnienie ( lub w delikatnej wadze ) są mechanicznie sumowane ( mechanizm jest istotny ) dwie siły - proporcjonalna do mierzonego ciśnienia/wagi i równoważąca siła wytwarzana przez solenoid najczęściej podana poprzez wzmacniająca dźwignie. Indukcyjny sensor nierównowagi sił poprzez wzmacniacz i wzmacniacz mocy steruje solenoidem wymuszając równowagę sił. Zaletą rozwiązania jest znaczna dokładność i stabilność długoczasowa. Sensory ciśnienia z wagą prądową produkowane są też w Polsce.
W pokazanym schemacie (AN-301 NSC ) akcelerometru, sensor LVDT mierzy odchylenie wahadła ( powstaje ono skutkiem siły od przyśpieszenia ) od stanu spoczynkowego. Zdetekowane detektorem synchronicznym ( OPA 2D z tranzystorem JFet ) i odfiltrowane (OPA 3A) odchylenie LVDT podano do regulatora całkującego I ( OPA 3B z buforem mocy LH002 ) zasilającego solenoid likwidujący odchylenie od stanu spoczynkowego.
Na schemacie jest poważny błąd bowiem sygnał sinusoidalny do zasilenia LVDT wzięto z kolektora tranzystora generatora ( czyli z dużą składową stała ) a winien być wzięty tylko sygnał zmiennoprądowy AC. Sprawę tę już wcześniej omawiano. Błędy w tej interesującej AN nie są raczej przypadkowe.

1.Dokumentacje sensorów i urządzeń stosujących sensory indukcyjne
2.Układy mini i mikromocowe
Na kołysaniu cen i destabilizacji zyskują wielcy spekulanci. Zysk spekulantów to czysta strata odbiorców i producentów. Mówimy tu o potężnym kołysaniu i destabilizacji rynku i całego systemu światowego
OdpowiedzUsuńDla ilustracji. Cena miedzi za funt w kwietniu 1974 roku wynosiła 1.38 dolara za funt, w styczniu 1980 roku wynosiła 1.43 dolara za funt a w maju 1982 roku 0.54. A wartość inflacyjnego dolara sporo w tym czasie spadła.
Nic się nie zmieniło i Goldmany nadal to robią.
Autor naliczył w przemyśle i usługach 18 zastosowań indukcyjnego sensora zbliżeniowego ale z pewnością jest ich więcej.
OdpowiedzUsuńJa naliczyłam z trudem dziewięć. Warto rozwinąć ten temat.