Laboratorium zaawansowanej elektroniki i automatyki 26
Energetyka czyli wszelkie elektrownie, systemy przesyłu i dystrybucji była jednym z pierwszych działów przemysłu gdzie zastosowano automatykę przekaźnikową a potem regulatory.
Różne elektrownie wymagają różnych systemów automatyki i elektroniki.
O stosowanych w elektrowniach paliwach decydują ich ceny, dostępność i pewność dostaw ale także szkodliwość dla środowiska. Na wykresie pokazano udział paliw w brytyjskiej energetyce w okresie 1920-2019. Udział węgla sięgał 98%. Dość szybko próbnie zastosowano ropę naftową, którą wyparł własny a później importowany gaz ziemny spod dna morza. Obecnie węgiel jest używany w energetyce brytyjskiej z ropą marginalnie. Generacja panelami słonecznymi PV jest mała na tle generacji wiatraków i innych zielonych źródeł. Obecnie główne źródła to gaz, atom, wiatr, inne odnawialne. W przeszłości energetyk jądrowa miała znacznie większy udział ale obecnie budowane są nowe siłownie jądrowe dla zwiększenia udziału. Rośnie import energii elektrycznej ale jest niewielki i w przeszłości bywał większy. Od węgla ( zabójczy smog w Londynie ! ) odchodzono od końca lat czterdziestych ale nie monotonicznie na co przemożny wpływ miały przecież relacje cen paliw.

Komisja Europejska nie zgodzi się na dotowanie górnictwa aż do 2049 roku, ponieważ zasady pomocy publicznej w Unii Europejskiej są zupełnie jasne. Według prawa unijnego nie można dotować działalności górniczej i to kosmicznymi sumami.
Rozmowy między rządem a awanturniczymi i roszczeniowymi związkami zawodowymi nie mają nic wspólnego z umową społeczną.
Polscy górnicy pasożytując na społeczeństwie ciągną w dół całą gospodarkę i hamuja jej modernizacje.
W Europie najwięcej węgla brunatnego spalają Niemcy ale gospodarka Niemiec jest 6-7 razy większa od polskiej !
Popularna metafora „czarnego złota” jest szyderstwem bowiem Polska wydobywa węgiel absurdalnym nakładem środków, z nonsensownych głębokości z jakich innym opłaca się wydobywać złoto, ale nie węgiel.

Niemcy są liderem w przemysłowej technologii wodorowej. Uważają że globalna dekarbonizacja będzie służyć stworzeniu gigantycznego rynku nowych zielonych technologii i otworzy ogromny rynek na niemiecki eksport.
Pasażerowie mają się przesiąść się z samolotów do pociągów a z samochodów do komunikacji miejskiej. Samochody elektryczne mają być współużytkowanie, na przykład jako taksówki albo wynajmowane na czas auta autonomiczne.
W Niemczech przemysł motoryzacyjny jest w głębokiej przebudowie i wszystkie największe koncerny stawiają na elektromobilność. To stanowi potężne wyzwanie dla polskich poddostawców.
Gdy trzeba podejmować poważne decyzje trzeba nawet potwierdzić prawdziwość niby oczywistych tez. Badania potwierdzają zdroworozsądkową tezę:
"Technologicznie zaawansowane firmy i przedsiębiorstwa lepiej sobie radzą z kosztami opłat za emisje CO2, a nawet zwiększają swoje przewagi. Mniej nowoczesne firmy mocniej to odczuwają, tracąc konkurencyjność". (Themann and Koch 2018)
Na tle innych krajów świata transformacja energetyczna w Polsce będzie średnio ciężka. Są kraje gdzie będzie o wiele trudniej.
Proces rozwoju gospodarczego przypomina długotrwały proces uczenia się. Jedni się uczą a drudzy są tępi i leniwi.
Kraje Europy Środkowej częściowo przejęły w światowym systemie rolę Włoch i Hiszpanii co poskutkowało u nich stagnacją. Z 8 lat temu kapitał zaczął przygotowywać się do procesu migracji na znacznie tańszą niż Polska czy Słowacja, Ukrainę i Białoruś. Na razie uratował nas wojna na Ukrainie i stanie Białorusi u boku Rosji !
Net International Investment Position czyli Międzynarodowa Pozycja Inwestycyjna Netto reprezentuje posiadane przez kraj aktywa zagraniczne minus aktywa krajowe w posiadaniu obcokrajowców. Jest to inwestycyjny bilans narodowy kraju jako dłużnika - robotnika lub wierzyciela - kapitalisty. Dłużnicy pracują na dobrobyt wierzycieli którzy konsumują część PKB miejscowych. Wycofanie się kapitału z Polski oznacza makabryczne problemy.

Metody analogowego przetworzenia sygnałów są ograniczone co było powodem stosowania przetworników ADC i DAC oraz przetwarzania cyfrowego. Toteż sygnał z głowicy twardego ( ale także sygnał z nośnika optycznego ) dysku a nawet sygnał radiowy jest obecnie przetworzony na cyfrowy i dopiero cyfrowo obrobiony. Tak samo jest już z szerokopasmowym sygnałem radiowym.
Tanienie mikroprocesorów i wszelkich pamięci dało Digital Revolution a jej wejściową łączność ze światem zapewniają przetworniki analogowo cyfrowe ADC i cyfrowo analogowe DAC po stronie wyjścia.
Sygnał analogowy po odfiltrowaniu ( dla likwidacji aliasingu ) można przetworzyć na sygnał cyfrowy przetwornikiem ADC i z kodem korekcyjnym przesłać na dowolną odległość. Można go zapisać do pamięci i odtwarzać bez straty jakości. Można go programem komputerowym dowolnie przetwarzać.
W KOMUNIKACJI odfiltrowany dolnoprzepustowo sygnał bardzo regularnie ( nierównomierność próbkowania czyli jitter wnosi szumy i zniekształcenia ) próbkujemy jak najrzadziej stosując twierdzenie Kotielnikowa – Shannona. Filtry antyaliasingowe dla sygnału „video” są SAW ( Surface Acoustic Wave czyli z Powierzchniową Falą Akustyczną ) i LC. Filtr aktywny RC ( często z elementami LC ) dla sygnałów „akustycznych” był drogi i trudny w budowie toteż zastąpił go filtr cyfrowy w przetworniku ADC Sigma Delta, dalej SD.
W AUTOMATYCE nie stosujemy filtru antyaliasingowego ( filtrowanie zawsze wprowadza opóźnienie) a tylko prosty filtr przeciwzakłóceniowy a sygnał próbkujemy bardzo często w stosunku do jego pasma dlatego że opóźnienie w pętli regulacji automatycznej jest bardzo szkodliwe dla jej jakości.
W komunikacji gotowy sygnał z przetwornika próbkującego DAC jest podany do selektywnego filtru rekonstrukcyjnego odtwarzającego sygnał analogowy lub stosujemy przetwornik DAC SD, który ma filtry cyfrowe.
W sterowaniu sygnał z przetwornika DAC podajemy do obiektu bez żadnego filtru.
Gdy w komunikacji sygnał wyjściowy ma być „analogowy” PWM, podany jest on do cyfrowego dolnoprzepustowego filtru interpolacyjnego oversampligowego ( tak samo jak w przetwornikach SD ) zwiększającego ilość próbek do okresu sygnału PWM i do modulatora PWM z odpowiednim algorytmem ( dobry jest quasi natural PWM ) aby uzyskać małe zniekształcenia nieliniowe / intermodulacyjne. Sygnał PWM z invertera mocy do głośnika przechodzi przez filtr dolnoprzepustowy LC który czasem jest pomijany.
W sterowaniu sygnał do przetworzenia na analogowy jest podany do prostackiego modulatora PWM a w istocie układu licznika i do obiektu, który dolnoprzepustowo wszystko odfiltruje.
Mikrokontrolery często nie mają przetwornika DAC. Mają natomiast modulatory PWM. Sygnał PWM można dolnoprzepustowo odfiltrować jeśli konieczny jest gładki sygnał analogowy.
Sygnały analogowe do serwomechanizmów w CD są PWM ale sygnał do sterowania Voice Coil przestawiającego głowice twardych dysków jest analogowy. Wzmacniacz mocy do VC ma przetwornik DAC z szeregowym interfejsem wejściowym o dużej szybkości taktowania do 50 MHz a nawet wyższej.
Wybór w telefonii przewodowej PCM częstotliwości próbkowania 8 KHz czyli maksymalnej teoretycznej szerokości pasma sygnału kanału 4 KHz był oczywistością dlatego że taka już była szerokość kanału w rozpowszechnionej telefonii nośnej.
Z kolei przy wyborze pasma kanału dla telefonii nośnej brano pod uwagę spektrum sygnału mowy w telefonii i jej zrozumiałość i możliwości techniczne ówczesnych aparatów.
Oczywiście ograniczenie pasma sygnału mowy od dołu i od góry zmniejsza jej zrozumiałość i w telefonii to zmniejszenie miało akceptowalny poziom. Podobne było też pasmo w radiofonii AM. Rozszerzenie pasma trochę polepsza zrozumiałość i odbiór mowy staje się przyjemniejszy.
Im większy jest iloraz pasma przepustowego do zaporowego filtru antyalisingowego tym filtr jest trudniejszy realizacyjnie w każdej technologii i droższy. Wybór realnego pasma przepustowego do 3.4 KHz w telefonii PCM przy próbkowaniu 8 KHz był jak najbardziej rozsądny.
W bardzo ambitnym standardzie Compact Disc przy paśmie sygnału 20 kHz i częstotliwości próbkowania 44.1 KHz, filtr antyaliasingowy był niezwykle trudny do wykonania bowiem dodatkowo miał mieć bardzo małe zniekształcenia fazowe. Filtr eliptyczny 12 rzędu oraz korektor fazy wykonano na kondensatorach i rezystorach o tolerancji < 0.1% oraz wysokiej jakości wzmacniaczach operacyjnych. Pierwsze urządzenia „nagrywające” nie spełniały wymogów standardu i niedługo zastosowano w ADC próbkowanie z podwójną częstotliwością 88.2 KHz i selektywny decymacyjny filtr cyfrowy.
Do czasów CD cyfrowe przetwarzanie sygnałów było egzotyką i tematem prac poszukiwawczych bo jakże nazwać rozpoznawanie z dźwięków hydrofonu okrętu podwodnego rodzaju statku czy rodzaju innego okrętu podwodnego lub odszumianie sygnału radarowego filtrem Kalmana aby jak najwcześniej wykryć wystrzelone sowieckie rakiety międzykontynentalne ICBM z głowicami jądrowymi.
Regulator PID w gruncie rzeczy jest filtrem czyli podlega pod termin DSP.
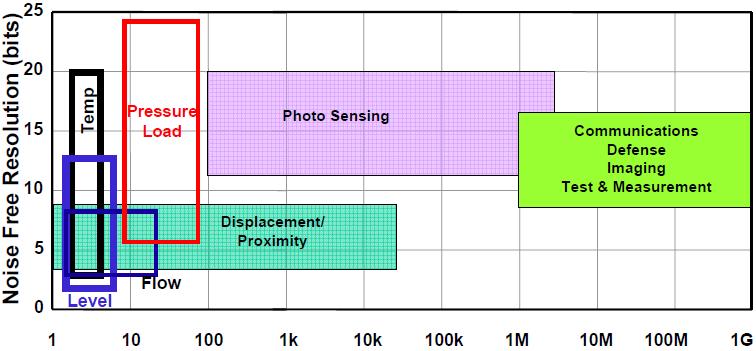
Koncerny mikroelektroniczne podają kontrowersyjne wykresy pola z wymaganą dokładnością i zakresem pasma częstotliwości ADC do różnych zastosowań.
Dobra waga o zakresie pomiaru 2000 gram ma rozdzielczość 0.1 grama i dokładność 0.1%. „Szerokopasmowy” sygnał wyjściowy z mostka tensometrycznego wagi jest mały i zawiera odbierane przez mostek zakłócenia mechaniczne czyli drgania aż do nisko - średnich częstotliwości akustycznych. Idealnym rozwiązaniem jest przetwornik ADC Sigma Delta o wejściu różnicowym z PGA ( Programable Gain Amplifier ) do bezpośredniej współpracy z mostkami wykonany w technologi CMOS z autorównoważeniem. Filtry cyfrowe w takim przetworniku ADC SD są bardzo proste na tle filtrów użytych w przetwornikach do sygnałów akustycznych standardu CD lub lepszego. Trochę dziwne jest to że takie przetworniki wyprodukowano tak późno.


Na przykładzie tej wagi widać że rozdzielczość przetwornika ADC może być wielokrotnie większa niż jego dokładność a nawet szum. Gdy na podobną wagę postawimy przedmiot o wadze bliskiej 2 Kg krótkookresowy odczyt jest stabilny ale już po jednym dniu się zmienia ! Jest pewne że dokładność jest jednak gorsza od 0.1% mimo iż taką podano w dokumentacji wagi.
W przypadku dokładnego statycznego ważenia samochodu ciężarowego z ładunkiem każdy mostek tensometryczny może mieć osobny tor z ADC lub mostki mogą być od razu połączone i jest tylko jeden sygnał dla ADC. W przypadku ważenia wagonów wolno przejeżdżającego pociągu wymagane pasmo jest szersze a dokładność siłą rzeczy znacznie niższa. Najniższa jest dokładność dynamicznego pomiaru masy ciężarówek przejeżdżających z normalną prędkością circa 70 Km/h przez autostradę z wbudowaną platformą pomiarową z mostkami tensometrycznymi. W tym wypadku potrzebny jest specjalny algorytm do pomiaru i estymacji nacisku każdej osi i całkowitej masy jadącego samochodu. W sygnale z mostka tensometrycznego widać drgania pojazdu i kół, podmuchy wiatru i wpływ innych przejeżdżających samochodów. Użyteczność czyli wartość dodana wytwarzana przez taki system pomiarowy jest duża. System może się też uczyć i korygować pomiar po rozpoznaniu przez system z kamerą typu samochodu. Skomputeryzowana dynamiczna waga jest elementem systemu siecio - centrycznego. Przeładowane i niesprawne samochody niszczą drogi i stwarzają zagrożenie dla pozostałych uczestników ruchu drogowego. Przy małym przeładowaniu wystarczy wysoki dyscyplinujący mandat a przy dużym przeładowaniu konieczny jest zjazd na wagę statyczną, aresztowanie samochodu na parkingu do czasu od - ładowania go i skierowanie sprawy do sądu.
Mostek podobny do tensometrycznego mierzy też ciśnienie. Różnicowy pomiar ciśnienia ze zwężką służy do pomiaru przepływu. W przypadku rurociągów o średnicy ponad 1000 mm wartość przepływającego gazu ziemnego jest potężna i wymagany jest dokładny pomiar przepływu i ciśnienia.
Wymienionymi przetwornikami ADC SD do mostków można też bardzo dokładnie mierzyć ( konieczna jest programowa linearyzacja ) temperaturę z mostka z RTD PT100/1000. Inne przetworniki z takiej rodziny pracują bezpośrednio z małym sygnałem termopar.
Bardzo dokładny pomiar temperatur i ich regulacja w zasadzie wymagane są tylko w przemyśle półprzewodnikowym.
Dokumentacja do takiego przetwornika ADC SD ma objętość około 100 stron i bardzo użyteczny jest system ewaluacyjny oszczędzający czas projektanta – programisty. System z takim przetwornikiem zawsze ma mikrokontroler. Waga jest z reguły elementem stanowiska kasowego.
Niektóre mikrokontrolery produkowane na licencji ARM mają wbudowane takie dokładne przetworniki ADC SD i z tego powodu układy scalone tych przetworników tracą racje bytu. Mikrokontrolery takie na przykład używane są w licznikach energii elektrycznej.
Idea przetworników analogowo / cyfrowych i cyfrowo – analogowych pojawiła się pod koniec lat czterdziestych. Odbiorcą sygnału cyfrowego z przetwornika ADC mógł być człowiek, wyspecjalizowane urządzenie cyfrowe lub mikrokomputer, minikomputer lub komputer.
Penetracja telefonii przewodowej w USA o dekady wyprzedziła świat. Był to w USA wielki biznes !
W łączności dalekosiężnej używano telefonii nośnej czyli sygnału zbiorczego z mnóstwa kanałów z podziałem częstotliwościowym FDM. Sygnał przesyłano przewodem koncentrycznym i radiowymi liniami mikrofalowymi. W systemie używano mnóstwa selektywnych filtrów LC z dodatkowymi rezonatorami kwarcowymi. Im więcej było kanałów tym sygnał miał większą wartość szczytową w stosunku do wartości średniej stwarzając dla licznych wzmacniaków na długiej linii bardzo wysokie wymagania. W dodatku trzeba było bardzo dokładnie pokryć rosnące z częstotliwością tłumienie użytego kabla koncentrycznego. Używano we wzmacniakach specjalnie produkowanych liniowych tranzystorów o już mikrofalowej częstotliwości granicznej. Z racji koniecznej wysokiej rozdzielczości uzysk produkcyjny tranzystorów był mały a cena wysoka.
Telefonie nośną wysokiej krotności opanowano tylko w kilku krajach świata a blok wschodni nie był w stanie jej opanować i stąd takie problemy z łącznością międzymiastową w bloku i w PRL w szczególności.
Nad przetwarzaniem ADC w Bell Laboratories pracowano od początka lat pięćdziesiątych.
W BSTJ 1962-1 ( Bell System Technical Journal ) objętości 383 strony szczegółowo ( nawet schematy !) opisano system PCM T-1. 24 sygnały analogowe z linii telefonicznej podano do filtrów antyaliasingowych LC i poprzez multiplekser i układ Sample Hold do analogowego kompresora sygnału i dalej 7 bitowego przetwornika ADC i poprzez koder na linie transmisyjną o paśmie do 1.544 MHz. Odebrany z linii ( z regeneratorami ) sygnał podano do przetwornika DAC i poprzez analogowy ekspander na multiplexer i na odbiorcze filtry rekonstrukcyjne LC.
Bell miał rekordową liczbę Noblistów a BSTJ był najważniejszym pismem naukowo - technicznym świata. W 1974 roku opisano projektowanie optymalnych aktywnych filtrów RC nadawczych – antyalisingowego i odbiorczych czyli rekonstrukcyjnego do telefonii PCM.
Bell w 1964 roku uruchomił między wybrzeżową ( mowa o oceanach i USA, czyli przez cały kraj ) eksperymentalną linie PCM szybkości 224 Mbits/sec co wydawało się niemożliwe w tamtych czasach. W numerze BSTJ 1965-9 opisał terminal do tej linii a w numerze 1966-7 opisał użyte repeatery na linii.
Użyto tranzystorów krzemowych o Ft=1Ghz i germanowych ( prawdopodobnie była to technologia SiGe masowo zastosowana później po 3 dekadach ) o Ft>4 GHz.
Przetwornik ADC 9 bitowe do sygnału telewizyjnego wykonano na dwa sposoby. Półprzewodnikowy ADC ze składaniem sygnału z wyjściowym kodem Graya do transkodowania na binarny i drugi ze specjalną lampą podobną do oscyloskopowej gdzie na ekranie był 9 bitowy wzorek ścieżek dla bitów. Odpowiednio ukształtowana wiązka elektronów była odchylana przetwarzanym sygnałem analogowym dając na 9 wyjściach niewielkie sygnały cyfrowe do wzmocnienia.
Specjalnie na potrzeby telekomunikacji PCM wyprodukowano później scalone przetworniki DAC od razu z nieliniową charakterystyką kompresji – ekspansji. Kompresje – ekspansje stosowano dla zachowania dynamiki w szerszym zakresie amplitud sygnału. W istocie były to przetworniki 12 bitowe z prostym układem logicznym kompresora – ekspandera tworzącym / akceptującym standardowy wyjściowy kod 8 ( Europa i świata ) lub 7 bitowy ( USA i przyboczni).
Wyprodukowano także w już technologi NMOS układy bardzo upraszczające wykonanie cyfrowej centrali telefonicznej PCM.
Obecnie w telefonach i smartfonach sygnał z mikrofonu przetwarza przetwornik ADC SD będący małym elementem wielozadaniowego chipa.
Odczyt ze skali miernika magnetoelektrycznego wymagał koncentracji uwagi i chwili czasu. Finalnie był w mózgu operatora przetwarzany na wartość cyfrową do dalszej interpretacji na przykład porównania mierzonego napięcia / prądu w układzie z napięciem podanym na schemacie serwisowym lub do zapisania w dzienniku pomiarów.
Pierwszy prymitywny woltomierz cyfrowy DVM wyprodukowano w 1954 roku. Przetwornik analogowo - cyfrowy ADC z podwójnym całkowaniem szybko stał się standardem w multimetrach cyfrowych. Czas całkowania mierzonego sygnału zawsze był wielokrotnością czasu okresu napięcia sieciowego 60 lub 50 Hz dla uzyskania dużego tłumienia wszędobylskich zakłóceń od sieci zasilającej. Urządzenia z potrójnym całkowaniem osiągały rozdzielczość 6 1/2 cyfry. Jednoczesny pomiar tego samego napięcia dwoma takimi przyrządami jednak wskazywał pod koniec zakresu różnice na poziomie 1/20 000 a więc faktyczna dokładność 4 1/2 cyfry była dużo gorsza niż rozdzielczość. Przyrządy te wymagały okresowej kalibracji.
Minimalny, okres taktowania licznika w ADC z podwójnym całkowaniem wynika z pasma integratora oraz czasu reakcji komparatora, układu logicznego i kluczy w fazie decałkowania co naturalnie ogranicza rozdzielczość takiego ADC. Celem powiększenia rozdzielczości po pierwszym decałkowaniu jest drugie finalne decałkowanie ale sygnałem mniejszym przykładowo 100 razy aby łatwo wynik scalić w liczniku dziesiętnym. Algorytm podwójnego całkowania modyfikowano na wiele sposobów.
DVM wzbogacono o pomiar oporności i prądu stałego i pomiar napięcia zmiennego a później wartości skutecznej RMS. Ustawienie na DVM pomiaru oporności przy faktycznym mierzeniu napięcia nie było śmiertelne dla systemu ponieważ zastosowano do pomysłowej ochrony między innym termistor PTC. Dokładność pomiaru na zakresach zmiennoprądowych AC była dużo gorsza niż na zakresach stałoprądowych DC. Miernik czasem mógł sterować drukarkę. W PRL produkowano licencyjne (!) mierniki V530...543 z lampami wyświetlającymi Nixie.
Produkujący duży asortyment bardzo dobrych ( jego główny konkurent to Tektronix ) przyrządów pomiarowych koncern HP w 1967 roku wypuścił minikomputer 2116 specjalnie do współpracy ze swoimi przyrządami pomiarowymi jako że testy i eksperymenty w laboratoriach koncernów USA stawały się coraz bardziej skomplikowane. HP wylansował standardy interfejsów dla urządzeń pomiarowych. Modernizowaną linie maszyn 2100 pod zmienionymi nazwami HP produkował bardzo długo.
Intersil w 1977 roku wypuścił wykonane w analogowo – cyfrowej technologii CMOS rewolucyjne układy scalone w obudowie DIL40 kompletnych mierników cyfrowych z przetwornikiem ADC podwójnego całkowania. Układ ICL7106 bezpośrednio sterował wyświetlacz LCD a mniej popularny ICL7107 wyświetlacz LED.
Z uwagi na duże napięcie niezrównoważenia wzmacniaczy operacyjnych w technologi CMOS zastosowano w nich idee autozerowania. Szybko odkryto ogromny potencjał nowych układów scalonych i szybko masowo wyprodukowano hybrydowe dzielniki rezystorowe o wystarczającej dla wielozakresowego miernika 3 1/2 ( max +-1999 ) cyfrowego dokładności. Ceny mieszczących się w dłoni mierników zasilanych bateryjką 9V szybko spadały i spadały. To Intersil zdemokratyzował cyfrowe mierniki. Wadą układów był długi czas wyjścia z nasyceni po przesterowaniu i Intersil tej wady dość długo nie usuwał mimo iż było to proste. Mierny był też dodatkowy zewnętrzny tor zmiennoprądowy w miernikach. Miernik mierzył napięcia i prądy stałe i zmienne ( w najtańszym rozwiązaniu były tylko zakresy 200 i 1000(750) Vac bez pomiaru prądów AC z jedną diodą jako prostownikiem ), oporność, napięcie przewodzenia diody i wzmocnienie tranzystorów NPN / PNP i czasem temperaturę załączoną do kompletu termoparą typu K. Dołożenie przetwornika F/V dawało mało dokładny ale użyteczny pomiar częstotliwości. Układ do pomiaru pojemności też nie był skomplikowany.
Niedrogo a później tanio otrzymywało się uniwersalny przyrząd zastępujący zestaw dawniejszych przyrządów pomiarowych. Podobne układy produkowane są jeszcze obecnie !
Układy ICL7106/7 mogły też bezpośrednio ratiometrycznie pracować z sensorami mostkowymi.
Podobny układ ICL7109 o rozdzielczości +-12 bitowej czyli 13 bitowej miał interfejs do systemu z mikroprocesorem a nie do wyświetlacza LCD - LED.

W układach przetworników ICL można byłoby dodatkowo zintegrować logikę i przełączniki do uzyskania funkcjonalności Autorange ale chcąc aby pomiary na zakresie zmiennoprądowym AC miały sensowne pasmo, konieczna była znaczna ilość elementów zewnętrznych. Dla tej i innych funkcjonalności konieczna jest obudowa IC o większej ilości pinów a technologii wielopinowych obudów jeszcze nie było. Dopiero procesor 68000 Motoroli użył dużej, niepraktycznej obudowy DIL64 a Intel użył już do procesorów 80286 obudowy SMD PLCC68. Praktycznym rozwiązaniem zastosowanym przez koncerny Japonii była obudowa DIL ale o pinach w odległości 0.07 cala a nie jak normalnie 0.1 cala.
Zmodyfikowaną metodę podwójnego całkowania w ADC stosowano też w bardzo dokładnych miernikach LC mierzących też dobroć elementów Q. W drogich przyrządach stosowano kilka częstotliwości pomiaru LC do wyboru.
Oczywiście przyrząd przewidziany do stosowania na linii produkcyjnej musi mieć interfejs i funkcjonalności umożliwiające współpracę z komputerem lub PLC sterującym linii. Może współpracować z sortownikiem. Może być wymagany szybki pomiar.
Podwójne całkowanie wraz z modyfikacjami jako metoda ADC, jedno - zboczowe przetwarzanie ADC, przetwarzanie napięcia na częstotliwość V/F oraz dolnoprzepustowe filtrowanie sygnału PWM i przetwarzanie częstotliwości na napięcie F/V jako metody przetwarzania DAC należą do grupy metod czasowych.
National Semiconductor w AN-260 dawno opisał jednozboczowy przetwornik A/D o rozdzielczości 20 bitów z optoizolacją do mikrokontrolera. Przetwornik taki w przeciwieństwie do metody podwójnego całkowania nie tłumi zakłóceń na sygnale wejściowym i musi być poprzedzony rozbudowanym filtrem co jest wielką wadą.

Pierwszy komercyjny moduł K2-W dwu lampowego ( obydwie lampy są typu 12AX7 czyli europejskie podwójne triody ECC83 ) wzmacniacza operacyjnego wprowadziła firma Philbrick w 1952 roku. Parametry wzmacniacza były mierne ale poprawiono je.
Komputery analogowe w dobie powolnych komputerów cyfrowych były bardzo użyteczne. Pierwsze automatyczne systemy przeciwlotnicze ( od 1944 zwalczały skutecznie niemieckie samoloty zdalnie sterowanymi działami ) i antybalistyczne miały komputer analogowy ( system z Bell Laboratories i Western Electric należący do Bella ) prowadzący rakietę na zwalczany cel sygnałem ( szerokości impulsów do zmiany kierunków ) radaru.
N.B Rakieta „zwalczająca” sowiecki międzykontynentalny pocisk balistyczny ICBM z głowicą jądrową także miała głowicę jądrową ( mocy 25 lub 400 KT !) jako że nieprecyzyjny atak na bardzo dużej wysokości nie byłby rzekomo zabójczy dla bronionego obszaru.
Późniejsza rakieta Nike Zeus osiągała przy błyskawicznym wznoszeniu prędkość maksymalną 4900 km / h czyli ponad 4 Machy i wysokość maksymalną 280 KM.
Oczywiście do późniejszego sterującego komputera cyfrowego sygnał z radaru systemu anty - balistycznego podano m.in. poprzez przetwornik ADC.
Komercyjne ( paranoicznie drogie ) moduły przetworników ADC na płycie drukowanej sygnałów Video pojawiły się w latach siedemdziesiątych. Amerykański sygnał telewizji kolorowej NTSC był precyzyjnie wyspecyfikowany w normach RS-170 i RS343A ( RS – Recommended Standard ) a w niemieckiej normie dokładnie ustalono parametry sygnału kolorowego PAL. Przetworniki ADC i DAC miały zakres sygnału jak w normach. Wszelkie szybkie, szerokopasmowe sygnały nazywano Video, na przykład sygnał z radaru czy sygnał wzmocniony z fotopowielacza w przyrządzie „jądrowym” dla laboratorium fizyki.
Rozbudowane komputery analogowe zbudowane na układach scalonych wyposażono w przetworniki ADC i DAC ( mnożące DAC także do programowej zmiany parametrów symulowanego systemu jako potencjometry ) do współpracy z komputerem tworząc komputer hybrydowy bardzo użyteczny w zaawansowanych badaniach do czasu aż mocno wzrosła szybkość komputerów cyfrowych.
Popularyzacje przetworników ADC i DAC przyniosło zwiększenie produkcji minikomputerów i mocny spadek ich ceny oraz pojawienie się mikroprocesora, mikrokomputerów i mikrokontrolerów.
DEC do swojej popularnej rodziny minikomputerów PDP-11 produkował płytę z przetwornikiem ADC, multiplexerem i innymi elementami która bezpośrednio przetwarzała sygnały z przemysłowych sensorów na obiekcie. Pod koniec dekady lat siedemdziesiątych Analog Devices i Burr Brown ze swoimi przetwornikami ADC ( 10 i 12 bitów ) i DAC oferowali takie płyty do różnych mikrokomputerów. Miały także wejścia i wyjścia binarne do sterowania logicznego niczym PLC.
Zasadniczą wadą tych płyt była delikatność ich wejść i wyjść zupełnie nie adekwatna do zastosowań przemysłowych. Ponieważ pojawiły się odpowiednie programy dedykowane do regulacji i sterowania przemysłowego wykonanie komputerowego systemu automatyki nagle stało się trywialne ale nadal jednak drogie.
Dopiero późniejsze, bardziej rozbudowane mikrokontrolery wyposażono w przetworniki ADC wraz z multiplexerami a później też z PGA.
W przetwornikach DAC szybko zastosowano drabinki rezystorów R-2R. Gdy bitowymi kluczami były tranzystory CMOS jak w 12 bitowych układach AD7541 przetwornik akceptował napięcie odniesienia dowolnego znaku i wielkości czyli przetwornik DAC był mnożący.
Z drabinkami R-2R pracowały też klucze bipolarne najczęściej jako przełączniki prądowe. Przetwornik DAC z komparatorem i sterującym rejestrem aproksymacyjnym stawał się przetwornikiem ADC.

Mankamentem próbkującego przetwornika ADC z przetwornikiem DAC z komparatorem i rejestrem aproksymacyjnym SAR jest konieczna szerokopasmowość komparatora oznaczająca szumy i krytyczna jest aranżacja dla eliminacji zakłóceń, konieczna dla poprawnej pracy.
Obecnie przetworniki DAC bazujące na bardzo dokładnych rezystorach mają rozdzielczość do 20 bitów a ADC do 16-18 bitów. Rozdzielczości nie należy utożsamiać z dokładnością.

Rolę części dokładnych rezystorów mogą w układach CMOS spełniać dokładne kondensatory.
Na rysunku pokazano fragment rozwiązania stosowanego w 8 i 10 bitowych przetwornikach ADC w technologii CMOS koncernu National Semiconductor,


Aby sprostać ekstremalnym warunkom otoczenia w komorze silnika samochodu aluminiowa skrzynka ECU była hermetyczna. Płyta PCB w obudowie ECU nie mogła wykazywać żadnych rezonansów mechanicznych. Podobna jest budowa ECU silnika odrzutowego ale zastosowano tam na PCB nie laminat szklano - epoksydowy ale poliamidowy tak jak wcześniej w elektronice rakiet. Laminat ten jest bardziej wytrzymały mechanicznie, zwłaszcza na drgania.
Potrzeba jest matką wynalazków.
Gdy potężny duet Sony - Philips finalizował prace nad rewolucyjnym odtwarzaczem CD nie było w ogóle dość szybkich przetworników DAC 16 bitowych a mniej dokładny kosztował tyle ile miał kosztować cały odtwarzacz aby stać się towarem masowym a potrzebne były w nim dwa przetworniki DAC .
Dokładność i rozdzielczość przetworników DAC z rezystorami i drabinkami rezystorów wynika z powtarzalności rezystorów i przy używaniu tranzystorów różnej powierzchni z dokładności założonego podziału prądu przez tranzystory. Badacze duetu wymyślili więc metodę dynamicznego równoważenia podziału prądów w przetworniku DAC i zwykłą technologią monolityczną wyprodukowano niedrogi 14 bitowy DAC Philipsa TDA1540.
Dwa minimalnie różne prądy ( różnica wynika z niedoskonałości technologii ) z których jeden jest trochę większy a drugi mniejszy są przełączane po połowie czasu i sumowane. W rezultacie osiąga się znakomicie równy podział prądu.



Ale wykonany zwykłą tanią technologią bipolarną układ był 14 bitowy a standard CD jest 16 bitowy.
Podwójny 16 bitowy był dopiero trochę późniejszy układ przetwornika DAC TDA1541, którego brzmienie zdaniem audiofilów jest niedoścignione do teraz.
W pierwszych odtwarzaczach cyfrowe próbki sygnału podawano do DAC z podstawową szybkością 44.1 kHz i na wyjściu układu był rozbudowany i kosztowny analogowy filtr eliptyczny 9 rzędu z korektorem fazy do usunięcia Obrazu ( sprawę rekonstrukcji według Kotielnikowa już wcześniej teoretycznie „omówiono” ) przetwarzania wokół harmonicznych 44.1 kHz w dodatku psujący charakterystyką fazową. Dodatkowo schodki sygnału z wyjścia DAC zamiast impulsów dawały 3 dB spadek charakterystyki częstotliwościowej przy maksymalnej częstotliwości sygnału a zwężanie „impulsu” co prawda zmniejszało spadek ale relatywnie zwiększało Obraz wokół harmonicznych 44.1 KHz czyniąc filtracje rekonstrukcyjną jeszcze trudniejszą oraz zwiększało szumy i zniekształcenia we wzmacniaczach operacyjnych filtru.
Duet Sony – Philips był bardzo zdeterminowany i pierwsze niedoskonałe odtwarzacze były wprost szalonej komplikacji mając aż 6 mikrokontrolerów. Aby jednak użyć wszystkich 16 bitów standardu i pozbyć się rozbudowanego i drogiego rekonstrukcyjnego filtru analogowego zastosowano interpolacyjny cyfrowy filtr dolnoprzepustowy FIR bardzo wysokiego rzędu z wyjściowym kwantyzerem i filtrem Sigma Delta. Układ SAA7220 czterokrotnie podnosił ilość próbek podanych do przetwornika DAC a mały filtr analogowy za DAC był prosty i taniutki. SAA7220 to wyspecjalizowany procesor DSP. Nagle tania i wyrafinowana technologia DSP trafiła pod strzechy wraz z 16 bitowym przetwarzaniem DAC.
Interpolacyjny, dolnoprzepustowy filtr FIR 4 x krotnego oversamplingu w technologi NMOS był początkowo 96 rzędu czyli w istocie z racji zer pomiędzy próbkami sygnału z częstotliwością początkową 44.1 KHz były 4 zestawy współczynników filtrów FIR 24 rzędu. Za filtrem dano układ kwantyzera do 14 bitów i cyfrowy filtr Sigma Delta drugiego rzędu. I tak z 14 bitowym układem DAC uzyskano jakość prawie 16 teoretycznych bitów.
Skoro można było oversamplingiem podnieść częstotliwość próbkowania 4 razy i obniżyć wymaganą rozdzielczość przetwornika DAC z 16 na 14 bitów to można też zastosować oversampling 256 razy ( taki jest wynik rozważań teoretycznych ) i 1 bitowy kwantyzer z filtrem Sigma Delta i dać przetwornik DAC 1 bitowy.
Za wspomnianym już filtrem 4 krotnego oversamplingu dano prosty liniowy interpolator podnoszący ilość próbek 64 krotnie i na koniec układ kwantyzera Q do 1 bitu i cyfrowy filtr Sigma Delta 2 rzędu czyli modulator SD.


Jednobitowe przetworniki DAC i ADC mają różne mankamenty a optimum dla sygnałów akustycznych daje kilku bitowy przetwornik DAC oczywiście z interpolacją i modulatorem Sigma Delta. W najlepszych rozwiązaniach dynamika dochodzi do 120 dB co jest wynikiem wprost niewiarygodnym.
Idea szybkich przetworników ADC Flash znana była od lat. Przetwornik ma łańcuch rezystorów ( identyczny jak DAC String ) dających napięcia odniesienia komparatorom i tyle komparatorów jaka jest rozdzielczość przetwornika. Produkowano przetworniki w technologi bipolarnej o rozdzielczości 4 i 6 bitów. Przetwornik Flash 8 bitowy wymaga 256 komparatorów a więc bardzo dużo. Kod termometryczny z wyjść komparatorów układ logiczny zamienia w wyjściowy kod binarny. Przetworniki Flash w technologi bipolarnej były drogie i używano ich tylko w urządzeniach profesjonalnych. Zastosowanie układu próbkująco pamiętającego Sample – Hold przed przetwornikiem Flash nie jest konieczne ale powiększa przy rosnących częstotliwościach efektywną liczbę bitów ENOB czyli jest wskazane jeśli nie... konieczne.
Koncern ITT w 1982 roku pokazał i niedługo zaoferował zestaw układów scalonych do cyfrowego odbiornika TV Digit 2000. Zastosował w nim do przetwarzania sygnału Video 7 bitowy przetwornik Flash ADC w technologii NMOS ( o dużo większej gęstości integracji niż bipolarna ) ale co linie obrazu zmieniał offset aby podwyższyć efektywną rozdzielczość do ponad 7 bitów. Częstotliwość próbkowania ADC była 4 razy wyższa niż częstotliwość podnośnej koloru PAL czyli 17.72 MHz. ITT zastosował do obróbki dźwięku swój programowany procesor DSP. Wejściowe i wyjściowe przetworniki ADC i DAC do sygnału dźwiękowego używały sygnału PWM. Tor był znacznie gorszej jakości niż standard CD ale można go było ulepszyć co później uczyniono.
Współcześnie najwyższe szybkość przetwarzania ADC uzyskuje się udoskonaloną odmianą metody składania sygnałów ( Bell 1963 ! ) ale w każdym stopniu przetwarza się nie jeden ale kilka 2,3 bitów metodą Flash i po złożeniu ustalonych bitów z sygnałem podaje się do SH następnego stopnia na zasadzie potoku. Sygnał z odjętymi kolejnymi ustalonymi najmocniejszymi bitami przepływa przez przetwornik potokowy Pipeline i wyniki w każdym stopniu dotyczą sygnału z innego momentu próbkowania na wejściu w czasie.
Toteż sygnały cyfrowe ze stopni przetwornika są przed złożeniem najmocniej cyfrowo opóźnione z pierwszego stopnia i dalszych aby je wyrównać w czasie. Przy cyfrowym składaniu eliminuje się też błędy co jest zdumiewająco proste.

Poglądowy rysunek nie pokazuje jego wysokiej wewnętrznej komplikacji czynionej przez filtry cyfrowe. Wyjścia są w standardzie JESD204B. Standard 204 wylansował Intel a w późniejszej odmianie B został ulepszony aż do szybkości 16 Gbps na linie.

Od ich narodzin najszybsze przetworniki ADC używane są w oscyloskopach cyfrowych. Wraz z postępami technologi konstrukcja DSO staje się prostsza i szybko one tanieją. Niestety popularne oscyloskopy DSO nie grzeszą nadmierną inteligencją oprogramowania.
Od długiego czasu podstawowymi sensorami kąta - położenia m.in. w maszynach CNC i robotach są resolvery i kwadraturowe optyczne sensory impulsowe z indeksem o wyjściach binarnych, do których to część mikrokontrolerów ma od razu interface co bardzo upraszcza budowę kompletnego serwomechnizmu
Scalony system „Resolver To Digital” przetwarza metoda amplitudową ( z obserwatorem ) położenie kątowe resolvera ( selsyn ) na liczbę którą może przeczytać procesor systemu CNC, robota lub innego. Dokładny RTD ( ma też wyjście prędkościowe o małych szumach co jest zaletą ) pracujący na zasadzie obserwatora zawiera między innymi dwa mnożące przetworniki DAC. Przemysłowa, hurtowa cena takiego układu RTD wynosi około 15 dolarów a więc układ jest okropnie drogi.
Im wyższa jest żądana maksymalna obrotowa szybkość pracy tym niższa jest dokładność przetwarzania spadając z 16 na 10 bitów.
„ Complete monolithic resolver-to-digital converter
• 3125 rps maximum tracking rate (10-bit resolution and CLKIN = 10.24 MHz)
• ±2.5 (+ 1 LSB) arc minutes of angular accuracy (B and D grades)
• 10-/12-/14-/16-bit resolution, set by user
• Parallel and serial 10-bit to 16-bit data ports
• Absolute position and velocity outputs
• System fault detection
• Programmable fault detection thresholds
• Differential inputs
• Incremental encoder emulation
• Programmable sinusoidal oscillator on-board
• Compatible with DSP and SPI standards
• 5 V supply with 2.3 V to 5.25 V logic interface Complete monolithic resolver-to-digital converter
• 3125 rps maximum tracking rate (10-bit resolution and CLKIN = 10.24 MHz)
• ±2.5 (+ 1 LSB) arc minutes of angular accuracy (B and D grades)
• 10-/12-/14-/16-bit resolution, set by user
• Parallel and serial 10-bit to 16-bit data ports
• Absolute position and velocity outputs
• System fault detection
• Programmable fault detection thresholds
• Differential inputs
• Incremental encoder emulation
• Programmable sinusoidal oscillator on-board
• Compatible with DSP and SPI standards
• 5 V supply with 2.3 V to 5.25 V logic interface ”

Dawniej gdy przetworniki DAC i ADC była drogie i marne stosowano metodę fazową do pomiaru kąta resolvera. Odwrotnie niż w metodzie amplitudowej uzwojenia SIN i COS są kwadraturowo zasilane sygnałami Sinus i Cosinus i mierzony jest cyfrowo licznikiem kąt między Sin a wyjściem resolvera które w metodzie amplitudowej jest wejściem. Zamieniona jest w metodach amplitudowej i fazowej rola uzwojeń resolvera jako wejść – wyjść. W metodzie fazowej dryft termiczny i długoczasowy wnosił filtr harmonicznych z generowanych cyfrowo sygnałów PWM SIN i COS. Ale znaleziono sposób na okresową kompensacje i na koniec rozwiązania fazowe dawały dobre rezultaty.
„Gdy się nie ma co się lubi to się lubi co się ma. Gdy się nie ma Grety Garbo to i Salcie nie jest zła”
W maszynach CNC, robotach edukacyjnych, ploterach, drukarkach, twardych dyskach, maszynach laboratoryjnych, farmaceutycznych i medycznych... stosowano silniki krokowe pracujące w otwartej pętli sprzężenia zwrotnego serwomechnizmu. Zbędny był sensor położenia i pracujący z nim przetwornik ADC i wyjściowy przetwornik DAC komputerka wytwarzający sygnał do „wzmacniacza” serwomechanizmu. Gdy nie stosowano hamulca i pamięci nieulotnej albo dla potwierdzenia położenia stosowano transoptor szczelinowy dający sygnał osiągnięcia położenia przy względnie powolnym przesuwie napędu z silnikiem krokowym. Najlepsze wykorzystanie możliwości silnika krokowego daje sterowanie mikrokrokowe bipolarne i odpowiednie układy scalone z przetwornikiem DAC i dwoma mostkami PWM mocy dla silnika krokowego opracowano w połowie lat osiemdziesiątych.
http://matusiakj.blogspot.com/2019/06/step-motor-system.html
Nazwa „Regulator Krokowy” PI-PID fałszywie sugeruje silnik krokowy. Regulator krokowy natomiast załącza napięcie sieciowe dwukierunkowemu silnikowi asynchronicznemu aktuatora w jednym z dwóch kierunków. Typowo silnik poprzez przekładnie przestawia zawór lub zasuwę. Czasy całego przestawiania są od dawna znormalizowane. Zaletą jest gładka zmiana w procesie nie powodująca niebezpiecznych spiętrzeń i rezonansów ale wadą jest mała szybkość reakcji i tam gdzie konieczna jest błyskawiczna reakcja dla bezpieczeństwa równolegle mógł czuwać siłownik hydrauliczny. Aktuator bez potencjometru położenia pracował z pseudo odtwarzaniem stanu położenia. Wyjściowy przetwornik DAC był zbędny
Alternatywą był w komputerku / PLC przetwornik DAC sterujący na przykład standardowym sygnałem analogowym 4 -20 mA analogowy aktuator co było rozwiązaniem dużo droższym.
Tranzystorowe mostki jednofazowe H do sterowania silnika DC i trójfazowe mostki do silnika BLDC / synchronicznego lub asynchronicznego zaczęły wypierać mostki tyrystorowe komutowane siecią do sterowanie silników prądu stałego w maszynach CNC i robotach w połowie lat osiemdziesiątych. Komputer sterujący sygnał dla „wzmacniacza” serwomechnizmu podawał do przetwornika DAC a ten do analogowego sterownika fazowego tyrystorów mostka. Dopiero pod koniec kariery tyrystorów okazało się że łatwiej jest cyfrowo licznikiem określić kąt wysterowania tyrystora. Przetworniki DAC stały się zbędne.
Texas Instrument wyprodukował pierwszy prymitywny mikrokontroler w technologi PMOS. Gdy trzeba było operować na sygnale analogowym był on przez zewnętrzny komparator porównywany ( na przykład ) z nastawą potencjometru i mikrokontroler dostawał sygnał cyfrowy z komparatora, który przecież jest jedno bitowym przetwornikiem ADC.
Zastosowanie przetwornika ADC scalonego z mikrokontrolerem ma wiele zalet. Może być on precyzyjnie taktowany zintegrowanym układem czasowym co ma znaczenie przy zastosowaniu „komunikacyjnym”. Z reguły seria pomiarów może zostać zaprogramowana i po jej wykonaniu generowane jest przerwanie do obsługi zebranych danych. Rezultat przetwarzania jest dostępny od razu. Zewnętrzny przetwornik ADC nie ma tych zalet. Małym mankamentem jest konieczność zachowania uwagi przy projektowaniu ścieżek płyty drukowanej jako że blok ADC mikrokontrolera ma osobne wyprowadzenia GND i zasilania. Producenci w dokumentacjach dają zrozumiałe rekomendacje, których należy przestrzegać. Jeśli to jest możliwe to zawsze stosujemy w systemie zasadę ratiometryczności aby pozbyć się błędu wprowadzanego przez dryft termiczny i długoczasowy źródła napięcia odniesienia. Zintegrowany w mikrokontrolerze przetwornik ADC przetwarza sygnał jednego znaku w stosunku do AGND. Większość sensorów daje sygnał o jednym znaku. Tylko pozornie znak ma temperatura w skali Celsjusza mająca offset w stosunku do skali Kelwina. Jednak sygnał z uzwojeń resolvera jest napięciem zmiennym ( także napięcia i prądy sieciowe ) i przed doprowadzeniem do wejść ADC należy do niego dodać ratiometryczny offset 1/2 Vref. Układ z reguły wykonany jest na wzmacniaczu operacyjnym. Aby błąd tego offsetu był minimalny i stabilny nie wolno czynić błędów w projekcie. Jeśli jeden opornik w układzie jest R a drugi 2R to nie dajemy różnych różnych oporników R i 2R ale R i dwa szeregowo połączone 2 x R. Jeśli potrzebujemy rezystancje 0.5 R to łączymy równolegle dwa rezystory R. Koszt jednego dodatkowego rezystorka SMD jest znikomy a redukcja błędu znaczna. Jeśli układ jest poprawnie wykonany na każdym etapie to w ogromnej większości wyprodukowanych urządzeń bez sygnału z przetwornikiem ADC 10 bitowym otrzymamy stabilny wynik 511 lub 512 ! Offset(y) można prosto skalibrować po Resecie wykonując kilkadziesiąt pomiarów dla eliminacji szumu ale offset jest zależny od temperatury i długoczasowo płynie i gdy jest przerwa w pracy urządzenia można kalibracje offsetu powtarzać. W przypadku resolvera sygnał PWM „zasilający” resolver jest podany z mikrokontrolera poprzez filtr RC do wzmacniacza „mocy” i jego programowe wyłączenie nie jest żadnym problemem.
Tak samo w inwerterze sterującym silnik prądu zmiennego do mierzonych prądów faz ( na opornikach mocy, izolowanym przetwornikiem z sensorem Hala lub izolowanym z barierą optyczną i przetwarzaniem ADC Sigma Delta ) trzeba dodać offset i podać do wejść dwóch równolegle pracujących ADC mikrokontrolera identycznie jak w przypadku resolvera bowiem dwa sygnały muszą być próbkowane w tym samym momencie okresu modulacji PWM. Zatem do invertera i resolvera trzeba stosować dedykowany mikrokontroler z dwoma równolegle pracującymi ADC.
Charakterystyka przestrajania telewizyjnej głowicy UHF napięciem 1-30V na kanałach 20-68 jest nieliniowa i stąd do strojenia odbiornika potrzeba dość dokładnego przetwornika DAC. Koncerny Japonii w czasie swojej ofensywy przemysłowej wyprodukowały na bazie mikrokontrolerów 4 i 8 bitowych rozbudowane mikrokontrolery do odbiorników TVC z pilotem. Sygnał z pilota za odbiornikiem sygnału na podczerwieni ( później scalonym ) był dekodowany przez dekoder w mikrokontrolerze. Mikrokontroler wytwarzał zmodyfikowany 13-14 bitowy sygnał PWM sterując inwerter tranzystorowy zasilany stabilnym napięciem 30-33V który to sygnał z inwertera po dolnoprzepustowej filtracji trzybiegunowym filtrem RC przestrajał głowicę. Inne sygnały PWM po filtracji regulowały kontrast, nasycenie, jasność, głośność a rzadziej barwę dźwięku bas i treble. Oczywiście układy wykonawcze audio i video były sterowane napięciem „stałym” czyli odfiltrowanymi PWM.
Wykonany w technologi bipolarnej i I2L ( część cyfrowa) jednoukładowy wielosystemowy procesor TDA8362 i pochodne odbiornika TVC był bardzo skomplikowany. Napięciami stałymi podanymi do TDA8362 mikrokontroler odbiornika zmieniał głośność, wyrazistość, kontrast, nasycenie, jaskrawość i hue. Ponieważ w tamtym czasie Philips od interfejsu I2C życzył sobie opłaty „royalties” nie zastosowano tego interfejsu komunikacyjnego i zintegrowanych przetworników mnożących DAC w roli potencjometrów aby nie ograniczać kręgu nabywców.

Philips opracował i spopularyzował dwuliniowy interfejs I2C głównie do zastosowań w sprzęcie Video i Audio ale nie tylko, do komunikacji mikrokontrolera z układami przetwarzającymi sygnały Video i Audio - początkowo analogowo a potem cyfrowo. Wykonawcze układy scalone miały swój unikalny adres dla szyny I2C. Interfejs ten później miały przetworniki ADC i DAC różnych producentów. Mikrokontroler cyfrowo interfejsem I2C poprzez układy wykonawcze regulował kontrast, nasycenie, jasność, głośność a rzadziej barwę dźwięku bas i treble. W układach tych stosowano w istocie mnożące 4-5-6 bitowe przetworniki DAC jako potencjometry. Repertuar układów był znaczny. Układy wykonawcze regulowały też geometrie obrazu, wzmocnienia i offsety torów Video RBG. Procesor przesyłał też rozkazy syntezerowi częstotliwości PLL a także komputerowemu dekoderowi teletekstu.
Układ analogowego stereofonicznego procesora dźwięku TEA6310 z DAC- ami jako potencjometrami sterowanymi cyfrowo interfejsem I2C do funkcjonalności Bass - Loudness i Treble - Loudness używa potencjometry 4 bitowe a do funkcjonalności Volume - Balanse nieliniowych 6 bitowych.

Odbiornik telewizyjny z „programatorem” z potencjometrami miał już często pilota zdalnego sterowania ale tylko 6 potencjometrów. Rozwój telewizji kablowej CATV zmusił konsumentów do nabycia nowych odbiorników z syntezą napięciową lub z syntezą PLL częstotliwości aby mogli odbierać mnóstwo programów z sieci kablowej. Inną sprawą jest to że CATV wymagała dużo lepszych tunerów i odbiór „starymi” odbiornikami z sieci kablowej był zakłócony intermodulacjami. Lepsze programy mikrokontrolerów same nastroiły odbiornik i to inteligentnie omijając „fantomy” powstające na skutek intermodulacji. Sprawa owej inteligencji w czasie strojenia przez niektórych producentów nie została opanowana do końca. Niewielkim wysiłkiem można było w sklepie a nawet w fabryce nastroić odbiornik także umieszczając dane w pamięci szeregowej EEprom odbiornika bez żadnego procesu strojenia
Mnożące przetworniki DAC CMOS nazywane są też potencjometrami. Używano ich w podobnej roli jak scalone w układach wykonawczych mnożące DAC z interfejsem I2C.
Mikrokontrolery mają bardzo rozbudowany podsystem liczników z rejestrami zaprzęgniętych do różnych celów. Sygnał PWM z mikrokontrolera filtruje się dolnoprzepustowo ( jak kiedyś w odbiorniku TVC ) otrzymując napięcie stałe lub wolnozmienne. Sprawa owej filtracji jest czasem trudna do rozwiązania. Gdy wbudowany mikrokontroler ma wypracować sygnał zadany dla zasilacza laboratoryjnego tętnienia PWM pojawią się jako zakłócenia w napięciu ( i przy pracy krzyżowej prądzie ) wyjściowym zasilacza co jest złe. Konieczne jest więc zastosowanie niedrogiego 12 bitowego przetwornika DAC R-2R lub innego z interfejsem szeregowym w małej obudowie.
Małe samodzielne sterowniki PLC mają z reguły dwa wejścia analogowe o zakresie 0-10V do których wprost procesowego sensora nie można dołączyć. Systemy PLC wejścia do analogowych sensorów mają jako nietani a czasem drogi moduł ADC do konkretnego sensora lub ich rodziny. Gdy w systemie są różne sensory trzeba zastosować kilka modułów co podraża system. Tam gdzie warunki pracy są trudne dedykowany kontroler ma szczelną metalową obudowę i jest odporny na wibracje. O żadnych modułach nie może być mowy. Producent kontrolera nie dedykuje go do konkretnego urządzenia producenta i tylko w przybliżeniu wiadomo jakie sensory będą zastosowane. Większa część interfejsów wejściowych do analogowych sensorów jest na jeden typ sensora ale mniejsza część interfejsów jest programowo konfigurowana dla dowolnego sensora co daje systemowi dużą elastyczność aplikacyjną. Interfejs uniwersalny do dowolnego ( w ramach przewidzianych sensorów ) zaprogramowanego sensora jest mocno skomplikowany. Aby ten stopień komplikacji chociaż trochę obniżyć stosujemy systemowy próbkujący przetwornik A/D o zwiększonej rozdzielczości bowiem cześć jego zakresu przetwarzania z konkretnym zaprogramowanym sensorem będzie niewykorzystana. Programowo zostanie wykonana prosta linearyzacja kwadratowa. Może być programowa filtracja dolnoprzepustowa.
Zliczenie w określonym przedziale czasu ilości impulsów z przetwornika napięcie na częstotliwość V/F daje przetworzenie ADC. Przy odpowiednim okresie zliczania ( krotność okresu ) mocno mogą być stłumione zakłócenia sieciowe 50/60 Hz co jest zaletą metody. Wadą jest słaba dokładność w grupie metod czasowych (!) i wąskie pasmo przetwarzania. Przetworniki V/F i F/V firm AD i BB były drogie natomiast tani był niezły układ LM331 ( RC4151 ) i ich kopie różnych producentów. Popularyzacja przetworników ADC i układów PWM w mikrokontrolerach zlikwidowała zainteresowanie alternatywnym przetwarzaniem z pośrednią częstotliwością V/F i F/V.

Wyrafinowane przetworniki DAC z oversamplingiem i specjalizowanymi procesorami DSP – filtrami ( w CMOS rozdzielczości 1.5 um tak jak równolegle w czasie procesory Intel '286 i '386 ) trafiły pod strzechy już w odtwarzaczach CD. Masowo przetwarzanie PWM jako DAC i przetworniki DAC jako potencjometry zastosowano w układach do sprzętu Audio - Video. Super szybkie przetworniki ADC Video typu Flash ( a po nich Pipeline ) masowo wyprodukował niemiecki koncern ITT a za nim inni. ITT zastosował też cyfrowe przetwarzanie szybkich sygnałów Video. Cyfrowa Rewolucja zaczęła się dużo wcześniej niż to się powszechnie uważa.
Postępy automatyzacji są dość powolne. Mimo iż Asea ( obecnie ABB ) w 1974 roku pierwsza wypuściła robota z napędem silnikiem prądu stałego DC a później zmiennego AC to liderem robotyki była i jest nadal Japonia. Obecnie roboty przemysłowe uczestniczą w produkcji nowych robotów ale człowiek jest jeszcze niezastąpiony w produkcji. Obecnie spore zainteresowanie stwarzają małe roboty zdolne bezpiecznie współpracować z człowiekiem.
Już na początku lat osiemdziesiątych było oczywiste że mikroprocesory - mikrokontrolery będą stosowane w coraz większej ilości wyrobów a przestarzałe wyroby bez nich będą tylko schyłkową produkcją nisko - marżową. I tak się stało.
W czasach Zimniej Wojny zakup przez kraje bloku wschodniego produkcyjnej technologi mikroelektronicznej był skutecznie blokowany przez USA. Blokowano nawet sprzedaż niezbyt nowoczesnych układów scalonych. Mimo tego ZSRR opóźniony był w tej technologii około 8-10 lat podczas gdy obecnie Rosja jest opóźniona o circa 20 lat a Polska półprzewodników w ogóle nie produkuje.
Samodzielność technologiczna jest wiele warta.
-Niemieccy producenci samochodów nie mogąc sprostać daleko - wschodniej konkurencji inspirowali do zaostrzenia norm czystości spalin dla stworzenia bariery importowej a jednocześnie ich samochody w rażący sposób norm nie spełniające wyposażyli w oszukańcze oprogramowanie maskujące. Oszustwo zostało zdemaskowane ale „cel uświęca środki”. Sprzedano wiele milionów samochodów za więcej niż bilion Euro !
-Iran pochopnie zastosował automatykę Siemensa, który wszelkie informacje o systemie przekazał dywersyjnemu zespołowi USA-Izrael , który zaatakował i uszkodził duży zestaw kosztownych wirówek do wzbogacania uranu demolując nuklearne zamiary Iranu
-Prowadzenie badań w automatycznych laboratoriach nad nowymi lekami a nawet szczepionkami trwa dekady ale jest opłacalne. Masowa produkcja leków i szczepionek jest wysoce rentowna. Szczepionkę przeciwko wirusowi Covid – 19 opracowała niemiecka firm Biontech a produkuje ją potężny Pfizer. Pod adresem produktów Astra Zeneca (UK) i J&J (USA) zgłaszane są zastrzeżenia. Szczepionki opracowały też Chiny i Rosja. W pesymistycznym scenariuszu gdy epidemia będzie się przeciągać wpływ środków ze sprzedaży szczepionek może wynieść 50 mld dolarów !
-Kupowanie broni od USA jest szaleństwem skoro jest ona zdalnie blokowana. Trzeba w niej zastosować własną elektronikę i oprogramowanie co nie jest znowu aż tak trudne i jest praktykowane w świecie.
-Izrael przekazał Moskwie kody do 40 dronów Hermes 450, które w 2007 roku Izrael drogo sprzedał Gruzji. Dzięki temu podczas wojny gruzińsko - rosyjskiej w 2008 roku, Rosja wykrywała i zestrzeliwała gruzińskie drony. W 2010 roku Rosja i Izrael porozumiały się w sprawie sprzedaży izraelskich dronów do Rosji i ich licencyjnej produkcji. Gruzja wyrzuciła pieniądze w błoto.
-Używanie typowych, ogólnie znanych systemów automatyki w systemach infrastruktury kraju oznacza zgodę na obezwładniający lub niszczący atak na nią jeszcze przed fizyczną agresją wojenną.
Przeciętny Polak wydaje 22% przeciętnych wydatków mieszkańca UE liczonych w Euro na R&D. Ciągle tracimy dystans zamiast go odrabiać. Środki te są w większości rozkradane.
Pozostaje tylko zacytować wielkich.
Benjamin Franklin: „Dramatem życia jest to, że starzejemy się zbyt szybko, a mądrzejemy zbyt późno”
Stanisław Lem: „Polska jest, za przeproszeniem, cywilizacyjnym zadupiem, które tak naprawdę nie liczy się w świecie.”.
Zdrowy poziom płac w danym kraju wyznacza głównie poziom technologii, szczególnie w sektorze dóbr handlowalnych międzynarodowo. Są wyjątki od tej reguły:
-Głównym przedmiotem eksportu USA są wydrukowane dolary
-Wysokie dochody osiągają prymitywne państwa mające zasoby surowców naturalnych do wyeksportowania, zwłaszcza ropy naftowej i gazu ziemnego.
-Przejściowo poziom płac podnosi zagraniczne zadłużanie się co kończy się kryzysem.
Bezwzględna wojna gospodarcza nazywana jest pokojowym współzawodnictwem. Nowoczesny eksport blokuje daną gałąź gospodarki u importera czyli blokuje jego rozwój i modernizacje.
Nic dziwnego że USA broniąc się przed dewastacją swojej gospodarki przez nowoczesny eksport Japonii zmusiły ją ( siłą ! ) do zastosowania zabójczych dla niej reguł kursu walutowego.
Polska jest krajem średniej wielkości. Oczywiście taki kraj nie może i nie powinien produkować wszystkiego tylko mieć parę kluczowych nisz w nowoczesnym (!) eksporcie. Tymczasem prawie cały nowoczesny „polski eksport”generują zachodnie firmy na terytorium Polski.
Polskie firmy nie potrafią produkować nawet podstawowego obecnie uzbrojenia. Położona stępka pod prom została po cichu złomowana. Do wiatraków nie robimy prawie nic. Pociąg składamy z importowanych elementów do wytłoczonej na miejscu blachy.
Strategia sprzedawania Polaków jako Taniej Siły Roboczej dla Zachodu, może się długofalowo okazać zabójcza. Niedawne ćwiczenia sztabowe Zima -20 wykazały że armia mając już uzbrojenie które będzie (?) miała za 10 lat została przez siły Rosji rozbita natychmiast a po 4 dniach otaczana była Warszawa.
Do obrony przez niechcianym cudzym eksportem i inwestycjami wymyślono cały arsenał utrudnień administracyjnych – wymogi środowiskowe, bezpieczeństwo, certyfikaty, krajowe normy...
Tuby światowej propagandy prezentują hegemona jako promotora nauki i technologii co jest już historią. USA nigdy nie produkowały nawet 1/4 ilości pamięci półprzewodnikowych masowo produkowanych przez Japonię. Obecnie USA chipami handlują ale mało ich produkują.
USA narzucając Japonii szkodliwy dla niej układ z Plaza faktycznie mocno przyhamowały rozwój technologii. Standard telefonii GSM jest europejski. Gdy chiński koncern Huawei w systemach 5G uzyskał blisko dwuletnią przewagę nad konkurencją, USA sięgnęły po narzędzia przymusu i szantażu tak jak wcześniej gdy zdołowały Japonię. Hegemon jest też hamulcowym postępu. Efekty ofensywy eksportowej Japonii był takie że mówiono że USA będą drugą ofiarą Zimnej Wony po ZSRR.
Sprawdzenie.
1.W cyfrowych centralach telefonicznych PCM sygnały akustyczne dla abonenta ( według norm ) i sygnały testowe generowano cyfrowo.
W tabeli podano kody cyfrowych telekomunikacyjnych sygnałów 1 KHz 0 dBm0 dla systemów z kompresjami „A-Law” i „u-Law”. Udowodnij że dane w tabelach oraz schemat cyfrowego generatora sygnału dla standardu CCITT są poprawne

Gdzie mają one jeszcze zastosowania ?
W programie tym użyto do wydajnej aproksymacji wariacji iteracyjnego „Remez exchange algorithm”
-Z czego wynika tak wysoka wydajność tego algorytmu ?
3.Sygnałowi 0..1 za przetwornikiem ADC liniowo odpowiada oporność ( z offsetem ) trochę nieliniowego sensora RTD PT100 w zakresie 0..200C. Daj kwadratową linearyzacje sensora stosując aproksymację dającą circa błąd równomiernie falisty czyli Czebyszewa temperatury. Jaka jest maksymalna wartość tego błędu ?
4.Mikrokontrolery mają obecnie złożone, autonomiczne systemy z przetwornikami ADC, które pozwalają w pełni wykorzystać możliwości procesora.
Jak skonfigurowany jest system w mikrokontrolerze PIC32 ( dokumentacja w PDF ) w poniższej funkcji gdzie celowo usunięto obszerne komentarze.
void initADC()
{
AD1PCFG = 0x0000;
AD1CON1 = 0x00E0;
AD1CSSL=0xFFFF;
AD1CON2=0x243C;
//AD1CON2=0x643C;
AD1CON3=0x0203;
mAD1SetIntPriority(7);
INTEnableSystemMultiVectoredInt();
mAD1IntEnable( 1);
AD1CON1bits.ADON = 1;
AD1CON1bits.ASAM=1;
}
Sprawdzenie pkt 2. Program Parks - McLellan jest genialny dlatego ze jednocześnie użyto: współrzędnych barycentrycznych, FFT i Remeza. Wszystkie te 3 genialne idee osobno zyskały szaloną popularność a w tym programie skumulowano ich wydajności. Powinni dostać za to Nobla bo ten program to nadal fundament DSP.
OdpowiedzUsuńWitam. Ta odpowiedż poprawna. A pozostała część ?
UsuńMnóstwo bardzo ważnych informacji ! Bardzo wartościowy blog.
OdpowiedzUsuń