Laboratorium zaawansowanej elektroniki i automatyki 10
Pierwsze telefoniczne Centrale AUTOMATYCZE na wybierakach i przekaźnikach pracowały już na początku XX wieku i wtedy też automatyka przekaźnikowa zawitała w przemyśle.
Pierwsze regulatory pneumatyczne do procesów ciągłych zastosowano już w 1933 roku. Pneumatyka została wyparta przez elektronikę.
Pierwszy komputer zastosowano w przemyśle w 1959 roku. Komputery stosowano zarówno do sterowania ciągłego i binarnego oraz do Centralnej Rejestracji i Przetwarzania Danych.
Centrale telefoniczne Bella dostarczały klientom blisko 500 usług. Masowa obsługa złożonych procesów ma już swoją długą historie.
Odpowiednie narzędzia do tworzenia programów dla usług nie pozwalały na naruszenie elementarnego bezpieczeństwa systemu i nawet przyuczona osoba mogła być programistą.
Równolegle do wydajności procesorów rośnie ( co prawda wolniej ) też szybkość komunikacji światłowodami. Koncern Hewlett Packard pod koniec lat siedemdziesiątych wprowadził względnie tanie, montowane na PCB kompletne odbiorniki i nadajniki do światłowodów o szybkości 5-10 Mbps promując też swój standard złącz do światłowodów.
Obecnie Analog Devices oferuje pokazany na rysunku scalony odbiornik optyczny ( Integrated SiGe PIN photodiode, transimpedance amplifier TIA, and limiting amplifier ) do szybkoœci 11.3 Gbps.


Bywało tak że stosowanie komputerów w biznesie i administracji nie tylko nie powodowało redukcji pracowników których prace „automatyzowano” ( to znaczy próbowano automatyzować ) ale zwiększało zatrudnienie ! Tak było i jest w Polsce.
Po automatyzacji samej produkcji przyszła kolej na automatyzacje procesów dostaw i procesów dystrybucji produkcji oraz ich rozliczenia.
Robert Solow, laureat Nagrody Nobla z 1987 roku, będący przedstawicielem ekonomii neoklasycznej, jest twórcą modelu wzrostu opartego o neoklasyczną funkcje produkcji. Profesor MIT (Massachusetts Institute of Technology) był doradcą ekonomicznym prezydentów Kennedy’ego oraz Johnsona. Badając wydajność pracy stwierdził : "Komputery widać wszędzie, poza statystykami wydajności". Ale to się potem zmieniło.
Solow i Rowthorn analizując dane z 59 głównych gałęzi gospodarki USA i Wielkiej Brytanii za okres 1987–2000 ustalili, ze rzeczywisty wzrost produkcyjności nastąpił zaledwie w 6 gałęziach. Oto one:
• sprzedaż hurtowa,
• sprzedaż detaliczna,
• giełdy towarowe.
Gałęzie te miały trzykrotnie większy wkład we wzrost niż trzy następne gałęzie:
• produkcja urządzeń elektronicznych,
• produkcja informatycznych urządzeń elektronicznych (w tym komputerów),
• telekomunikacja.
Co spowodowało tak fantastyczne wyniki w branży handlu, który poprawił wskaźniki produktywności? Odpowiedz – potencjał zintegrowanej komputerowo techniki logistycznej i handlowej. Zastosowanie komputerów do automatyzacji przepływu i nadzoru towarów, centralizacja magazynów lub ich pomijanie oraz lepsze zarządzanie. W uproszczeniu można to nazwać fenomenem Wall-Mart.
Komputery stosowano w handlu od lat. Poszczególne kasy pracowały on-line i centralny komputer w dużym markecie miał na bieżąco wszelkie dane o sprzedaży i stanie magazynu. Dopiero jednak przekroczenie masy krytycznej komputeryzacji oraz upowszechnienie Internetu, zastosowanego do integracji całości systemu oraz zastosowanie zintegrowanych narzędzi do zarządzania, dało spektakularny wynik.
Komputerowy system księgowy musi się stosować do odpowiednich ustaw. System kadrowy musi mieć zakodowane reguły wynikające z Kodeksu Pracy oraz innych ustaw i rozporządzeń.
Regulacje wewnętrznie sprzeczne i niespójne powodują niemożność ich poprawnego przetworzenia w program. Nadmierne skomplikowane regulacje również stwarzają problemy.
W erze przed komputerowej nośnikiem informacji był papierowy dokument. Sfałszowanie ważnego dokumentu karane było więzieniem. Obywatele i firmy dysponowali tylko odpisami oryginałów dokumentów przechowywanych w instytucjach, które je sporządziły. W razie zagubienia dokumentu można było uzyskać odpis.
Procedury operacyjne firm i instytucje nastawione były na papierowe dokumenty.
Obecnie każda nowoczesna firma ma procedury operacyjne korzystające z możliwości szybkiego przesyłania internetem plików.
Koszty wypadków drogowych i kolizji są ogromne. Toteż dyscyplinuje się kierowców i właścicieli pojazdów:
-Pojazd musi mieć ważne okresowe badania techniczne sprawności a w tym właściwą emisje toksyn
-Pojazd i kierowca muszą być ubezpieczeni od Odpowiedzialności Cywilnej
-Kierowca nie może być pod wpływem alkoholu lub środka odurzającego. Nie może przekroczyć dopuszczalnego czasu pracy. Prowadzi się masowe kontrole.
-Automatycznie kontroluje się przestrzeganie ograniczenia prędkości i zakaz wjazdu na skrzyżowanie na czerwonym świetle
Stosowany od lat sześćdziesiątych fotoradar zdjęcia pojazdów i kierowców przekraczających dozwoloną prędkość i wjeżdżających na czerwonym świetle na skrzyżowanie wykonywał na błonie fotograficznej, która po przewiezieniu do siedziby urzędu po wywołaniu była analizowana przez urzędnika odczytującego numer rejestracyjny pojazdu oraz stwierdzającego czy twarz kierowcy należy do właściciela pojazdu. Gdy kierował właściciel pojazdu otrzymywał pocztą mandat. W przeciwnym razie był zobowiązany do wskazania osoby kierującej pojazdem pod rygorem nałożenia grzywny za niewskazanie. Mandat opłacało się na poczcie lub w banku lub w urzędzie. Od Mandatu jako rodzaju Decyzji administracyjnej można się było odwołać. Procedury operacyjne instytucji nastawione były na papierowe dokumenty.
W dobie Internetu, telefonów i smartfonów w sytuacji gdy zdjęcia fotoradaru to pliki opisana procedura jest anachroniczna. Plik zdjęcia winien natychmiast być przesłany do komputera urzędu. Po automatycznym rozpoznaniu tablicy rejestracyjnej i twarzy z baz danych, w tej samej sekundzie wysyłany jest jednocześnie Email, SMS, MMS, głos z syntezatora zawierające pouczenie o możliwości odwołania lub żądanie podania danych kierowcy pod groźbą grzywny dwukrotnie wyższej niż to wynika z przekroczenia prędkości. Ogromna większość winnych wykroczenia przy okazji wykonywania innych płatności w banku internetowym kliknie też zapłacenie mandatu tym bardziej że niczego nie trzeba wpisywać a tylko kliknąć.
Przeładowane ciężarówki niszczą drogi. Przed automatyczną wagą drogową jest ograniczenie prędkości do 70 km /h i polecenie zjazdu ciężarówek na prawy pas a pasy rozdzielone są liniami ciągłymi aby pojazdy były na swoich pasach i nie dochodziło do manipulacji. Po przejechaniu przeładowanej ciężarówki jej zdjęcia są w tej samej chwili wysyłane do serwera a ten po identyfikacji natychmiast wysyła Email, SMS, MMS do właściciela pojazdu / kierowcy z odpowiednimi instrukcjami. Dopiero jeśli pojazd nie zjedzie na wskazany parking (są na nim kamery ) do akcji bezpośredniej musi wkroczyć policja.
Tradycyjnie przy „masowym” testowaniu kierowców na alkohol w oddechu, winny dawał Policji dokumenty a ta sporządzała stosowaną papierową dokumentacje mandatową lub kierowała papierową sprawę do sądu co zabierało sporo czasu. Obecnie alkomat powinien być zintegrowany z aparatem fotograficznym robiącym zdjęcie twarzy winnego ( tylko i wyłącznie ) oraz czytnikiem do dokumentu i podpisu winnego. Dane natychmiast są przekazane do serwera. Gdy winny nie ma dokumentu policja może go zwolnić tylko gdy zdjęcie twarzy potwierdza podane przez winnego dane. Nie ma żadnej możliwości manipulacji bowiem policjanci nie mają żadnej swobody działania. Zdjęcie winnego nie może przepaść. W ciągu dnia można przetestować kilka tysięcy kierowców i o to właśnie chodzi.
Wysokie prawdopodobieństwo „wpadki” wielu amatorów kieliszka skutecznie powstrzyma.
W Polsce jest około 4-5 mln starszych osób nie posługujących się internetem. Nie wiadomo jak wielu z nich jest kierowcami i czy w ogóle dłużej powinno być kierowcami. Wymóg podania numeru telefonu i adresu Email przez kierowców i właścicieli pojazdów nie pociąga za sobą praktycznie żadnych kosztów.
Właścicielom pojazdów i kierowcom można przypomnieć o badaniu technicznym pojazdów i opłaceniu ubezpieczenia OC.
Ogromne możliwości Internetu szybko rozpoznał Amazon, Alibaba, Google oraz portale społecznościowe... Za nimi wloką się spóźnialscy a za nimi daleko są skorumpowane „państwa”. Istoty dwunożne i dwurękie w parlamentach tych parapaństw dla korzyści swojej i władców marionetek wydalają półpłynne „prawo”.
W normalnym świecie prawo ma służyć całemu społeczeństwu. I tam automatyzacja zadań państwa przebiega całkiem sprawnie.
Natomiast w krajach komunistycznych i postkomunistycznych obowiązuje zasada „dajcie mi obywatela a znajdę na niego paragraf”. Tam automatyzacja – informatyzacja państwa oznacza chaos i korupcje.
Od kiedy Bell na początku lat osiemdziesiątych zastosował w telefonii procesor sygnałowy DSP stało się jasne że częstotliwość sygnałów które będą przetwarzane przez DSP a nie analogowo będzie cały czas rosnąć. I tak jest.
W Monitorze Pacjenta jest m.in. proste EKG, NIBP i pulsoksymetr.
W EKG mały sygnał od serca jest razem z dużym sygnałem DC polaryzacji elektrod. Analogowy filtr górnoprzepustowy ( 0.05 Hz dla pacjenta nieruchomego i 0.5 Hz dla ruchomego ale EKG jest już trochę zniekształcone przez filtr ) eliminował sygnał polaryzacji i wystarczał przetwornik A/D rozdzielczości 12 bitów jakie są w mikrokontrolerach. Ale są już EKG gdzie filtru górnoprzepustowego nie ma ale przetwornik A/D jest 18-20 bitowy.
W NIBP sygnał z sensora ciśnienia zawiera małe pulsacje na tle zmiany ciśnienia i stosowany jest filtr środkowoprzepustowy czyli kaskadowe połączenie filtru dolno i górnoprzepustowego. Wystarczał przetwornik A/D 10 bitowy w mikrokontrolerze a przy dość wolnym próbkowaniu radę dawał mało wydajny mikrokontroler. Są już NIBP bez filtru ze znacznie dokładniejszym przetwornikiem A/D a wydajny mikrokontroler radzi sobie z gęściej próbkowanym sygnałem.
W pulsoksymetrze (dalej się nim zajmiemy) jest dokładnie tak samo !
„Fale radiowe” są dobrem rzadkim którym trzeba racjonalnie gospodarować.
Zasilacze impulsowe oraz inwertery generują zakłócenia radiowe.
Zakłócenia w paśmie radiowym umownie podzielono na przewodzone siecią zasilająca w zakresie 0.15 – 30 MHz i promieniowanie o częstotliwościach powyżej 30 MHz.
Standardów dotyczących EMC jest kilkadziesiąt i szerokie ich omawianie jest jałowe tym bardziej że na przestrzeni dekad standardy ewoluują wraz z rozwojem technologii. Obecnie normy dotyczące pomiarów zakłóceń wydają się trochę dziwne bowiem norma dla zakłóceń przewodzonych wprost nawiązuje do stosowanej w radiofonii modulacji AM a norma na wyższe częstotliwości ji zakłócenia promieniowane jest jej pochodną.


W zakresie do 30 MHz zakłócenia przewodzone mierzy się na wtyczce ( jeśli jest ) przewodu zasilającego urządzenie. Dla ustabilizowania warunków pomiaru i stłumienia zakłóceń z sieci stosuje się LISN – Line Impedance Stabilisation Network. Prosty LISN ( są też bardziej skomplikowane pozwalające osobno mierzyć zakłócenia różnicowe - symetryczne i asymetryczne - wspólne ) można łatwo wykonać samemu pamiętając aby dławik nie miał rezonansu szeregowego poniżej F < 30MHz. Indukcyjność dławika nie jest krytyczna.

Pomiary wykonywane są w radiofonicznym pasmie 9 KHz ( w USA 10 KHz ) odbiornikiem AM z detektorem quasi- szczytowym o stałej czasowej narastania 1 ms i opadania 160 ms
Zatem poziom w paśmie 0.15-30 MHz obrazuje uciążliwość zakłóceń dla słuchaczy radiostacji AM w tych zakresach.
Dziwne jest stosowanie tej metody pomiaru także przy wyższych częstotliwościach i to ze stałą czasowa opadania 550 ms mimo iż w tych zakresach nie działa przecież radiofonia AM.
Na rysunku pokazano schemat blokowy odbiornika pomiarowego zakłóceń na zakres od 9 KHz do 3.3 GHz. Superheterodyna ma podwójną przemianę częstotliwości.

Sprawa zakłóceń jest złożona. Zakłócenia z jednej strony w konkretnym kanale komunikacyjnym degradują sygnał. Z kilku powodów filtry wejściowe za anteną i we wzmacniaczu wejściowym RF mają z reguły małą selektywność. Oczywiście sygnał złożony powoduje intermodulacje w stopniu wzmacniacza RF i w mieszaczu. Sygnał składający się z wielu elementarnych sygnałów ma z reguły bardzo dużą wartość szczytowa w stosunku do wartości skutecznej i średniej. Są to bardzo trudne sygnały. Dotyczy to zbioru elementarnych sygnałów w konkretnym zakresie radiowym, sygnału CATV i dawniej sygnałów telefonii nośnej. Obecne normy nie biorą tego problemu pod uwagę.
Identycznie jak zakłócenia powodują intermodulacje w odbiorniku UKF FM i telefonie komórkowym powinny być wzięte pod uwagę przy analizie zakłóceń.
Zasilacz Flyback Quasi resonanse pracuje ze zmienną częstotliwością w funkcji napięcia na kondensatorze prostownika i obciążenia. Jego widmo zakłóceń jest rozmyte a nie prążkowe jak przy stałej częstotliwości modulacji PWM ale tak samo szkodliwy.
Postęp w dziedzinie przetworników analogowo- cyfrowych jest duży. Przetworniki A/D mają duża rozdzielczość i zdumiewająco wysoką szybkość próbkowania. Zatem analizator zakłóceń przewodzonych mógłby pracować jako cyfrowy oscyloskop z przetwornikiem o dużej rozdzielczości z dość dużą pamięcią próbek.
Zakładając nieidealny filtr antyaliasingowy po przyjęciu w ciągu 0.1 sekundy 0.1*3* 30 =9 M próbek analiza FFT dałby nam obraz zakłóceń przewodzonych.
Przewodzone zakłócenie różnicowe /symetryczne X występuje między L1-L2/N ( w układzie trójfazowym L1-L2, L2-L3 i L3-L1) a zakłócenie wspólne/asymetryczne Y między L1+L2 a PE zaś w systemie trójfazowym L1+L2+L3 a PE.
Zakłócenia X to pierwotnie najczęściej spadek napięcia na ESR+ESL kondensatora prostownika sieciowego powstający po wpływem przepływu prądów o modulacji PWM.
Zakłócenie Y generowane jest przez „pojemność” między uzwojeniami pierwotnym a wtórnym w transformatorze zasilacza i napięcie PWM na nich i przez „pojemność” uzwojeń do żelaza w silniku i napięcie PWM na nich.
Słowo pojemność definicyjnie dotyczy elementów skupionych podczas gdy uzwojenie jest elementem rozłożonym o dość skomplikowanym zachowaniu.
Zakłócenia X tłumione są w filtrze indukcyjnością rozproszenia dławika Common, która z reguły wynosi 0.7-1% indukcyjności wspólnej oraz kondensatorami X.
Zakłócenia Y tłumione są indukcyjnością wspólną dławika Common oraz kondensatorami Y wnoszącymi w urządzeniu jednofazowymi prąd upływu płynący do PE a w wypadku odbiornika radiowego i TVC do anteny ! W filtrze trójfazowym przy identycznych wartościach kondensatorów Y w fazach i symetrycznym zasilaniu ustalony prąd upływu jest zerowy ale po uszkodzeniu jednego z kondensatorów prąd upływu się pojawia. Pojemność kondensatorów Y w urządzeniach trójfazowych jest z reguły znacznie większa niż w jednofazowych w urządzeniach „domowych” i tam dbałość o stan instalacji i przewodu PE i uziemienia jest szczególnie ważny.
Duże wartości kondensatory Y są w inverterach dużej mocy do silników.
Na rysunku pokazano trójfazowy filtr sieciowy do zasilacza tomografu komputerowego o mocy około100 KW. Wartości pojemności kondensatorów Y są naprawdę bardzo duże ! Przy dużych prądach z uwagi na rozmiar, wagę i cenę dławików Common ich indukcyjność jest niewielka i konieczne jest stosowanie filtra dwustopniowego. Dodatkowo dano w każdej fazie dla zakłóceń symetrycznych pojedyncze dławiki 10 uH.

Na wykresie pokazano przykładowe „widmo”mierzonych osobno przewodzonych zakłóceń X i Y.

Wracając do analizy w dziedzinie częstotliwości i czasu.
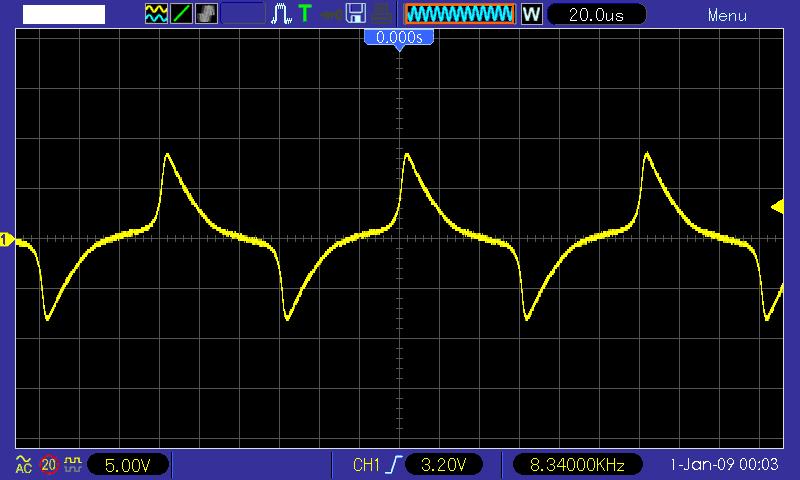
Rozważmy zakłócenia napięcia na odbiorniku mocy ( na przykład ściemniacz i żarówka ) przy sterowaniu fazowych w sieci 230 V – 50 Hz przy kącie wysterowania 90 stopni gdy są one największe. Załóżmy ze czas załączania triaka jest zerowy. Dla początka zakresu długofalowego harmoniczna 3001 o częstotliwości 150050 Hz ma amplitudę 76 mV. Oczywiście zakłócenie symetryczne (!) nawet bez filtru EMC wnoszone do sieci jest dużo mniejsze. Ale w paśmie radiofonicznym AM szerokości 9 KHz mieści się kolejnych 180 harmonicznych. Jak je zsumować i co z tego powstanie ? Droga ta prowadzi donikąd.
Odpowiedzią filtru środkowoprzpustowego RLC na skok jest oscylacja. Jednak selektywność odbiornika jest wyższa niż prostego filtru RLC. Niemniej odpowiedź filtru środkowoprzepustowego na skok to narastająca i gasnąca oscylacja. Czasy narastania i opadania są circa odwrotnie proporcjonalne do szerokości kanału. Czyli odpowiedzią radioodbiornika AM ( po wyprostowaniu tych oscylacji detektorem ) na każde załączenie triaka będzie impuls - trzask czyli przy 100 zakłóceniach na sekundę charakterystyczne nieprzyjemne warczenie.
Na wykresach pokazano moduł impedancji common rodziny dławików TDK-Siemens na takim samym ferrytowym rdzeniu toroidalnym. Impedancja mierzona jest nie tanim przyrządem Agilent 4284. Dławik o indukcyjności 47 mH znosi prąd obciążenia 0.3 A a dławik o indukcyjności 1 mH prąd 2 A. Czyli iloczyny kwadratu prądu i indukcyjności są podobne.
Oczywiście rezonans równoległy dławików o dużej indukcyjności jest tym niżej im wyższa jest indukcyjność. Przy mniejszych indukcyjnościach maksimum impedancji jest szerokie bowiem rdzeń ferrytowy ma już dużą stratność przy wysokich częstotliwościach.

Zaopatrując się w drogi dławik od zachodniego koncernu możemy założyć że ma on podane parametry. Natomiast dużo tańszy, dobrze wyglądający dławik od chińskiej firmy nie koniecznie musi mieć podane parametry.
Jak to skontrolować bez zaopatrywania się w drogi przyrząd który później będzie bezużyteczny.
Najbardziej uniwersalnym przyrządem jest oscyloskop. Sygnał z generatora podajemy do szeregowego dolnoprzepustowego filtru LR z rezystorem 75 Ohm i sygnał wyjściowy mierzymy oscyloskopem. Maksymalne tłumienie przy maksymalnej impedancji będzie spore i natykamy się na pierwszą przeszkodę. O ile sygnał o częstotliwości 0.5-2 MHz jest mocno stłumiony to zakłócenia o niskiej częstotliwości z generatora funkcyjnego przechodzą nietłumione co niweczy pomiar ! Włączamy w szereg z dławikiem kondensator 100 nF aby zrobić filtr środkowoprzepustowy CLR o asymptotycznej odpowiedzi przy dużych F identycznej jako dolnoprzepustowy. Filtr odetnie zakłócenia o małej częstotliwości.
Rezonans jest przy F=4.1 KHz czyli dławik ma odrobinę większą indukcyjność niż podał chiński producent. To dobrze. Zwiększając częstotliwość generatora i czułość oscyloskopu znajdujemy maksimum impedancji Z. Jest ono zbliżone jak dla TDK – Siemens. Rodzi się podejrzenie że produkcja odbywa się w Chinach a koncerny są tylko pośrednikiem handlowym.
Szukając rezonansu zauważamy ciekawe zjawisko. Przy dużej amplitudzie sygnału z generatora sygnał na wyjściu filtru jest mocno zniekształcony i ferro-rezonans występuje przy częstotliwości około 8 KHz. Momentowi szybkiego narastania sygnału odpowiada nasycenie rdzenia ferrytowego. Na płaskich odcinkach nienasycony rdzeń ma dużą przenikalność.
Łącząc uzwojenia dławika Common antyszeregowo znajdujemy rezonans o małej dobroci przy F=42 KHz czyli zgodnie z przewidywaniem indukcyjność różnicowa X jest trochę mniejsza od 1% indukcyjności wspólnej common.
Własności częstotliwościowe rodzajów ferrytów są dopasowane do zastosowania. Warto zwrócić uwagę że dla przykładu ferryty używane w dławikach SMD w cyfrowych torach sygnałowych w istotnym zakresie mają charakter rezystancyjny a nie indukcyjny !

1.Filtr sieciowy dla składowej różnicowej - symetrycznej zakłóceń X składa się z kondensatora prostownika 220 uF / 400V ( jego model w dokumentacji ) antyszeregowo połączonych uzwojeń dławika Common i kondensatora X-220 nF. Prąd „zakłóceń” ( zamiast inwertera lub klucza zasilacza ) do kondensatora prostownika doprowadza generator. Wcześniej zmierz moduł impedancji dławika w tym modzie stosując oscyloskop i generator oraz stwórz przybliżony model dla programu symulacyjnego. Ponieważ rezonanse dławika w tym modzie są niestety poza zakresem częstotliwości generatora należy je pominąć. Łatwy do znalezienia rezonans szeregowy kondensatora 220nF występuje przy częstotliwości około 3.4 MHz. Porównaj wyniki pomiaru z symulacją.
Ponieważ tłumienie filtru jest w interesującym zakresie częstotliwości duże a prąd generatora znacznie mniejszy niż prąd klucza w SMPS / Inwerterze zastosowano przedwzmacniacz przed oscyloskopem.
2.Filtr dla składowej wspólnej – asymetrycznej - common zakłóceń Y składa się z kondensatora Y - 2.2 nF między „izolowanym GND urządzenia” a „stroną sieciową zasilacza” czyli między początkami uzwojeń pierwotnego i wtórnego, oraz równolegle połączonych uzwojeń dławika Common . Prąd „zakłóceń” ( zamiast inwertera lub SMPS) powstaje dzięki efektywnej umownej „pojemności” między uzwojeniami pierwotnym a wtórnym ( lub „pojemności” uzwojeń silnika do żelaza) skutkiem zasilania uzwojenia pierwotnego transformatora poprzez generator. Dla modułu impedancji dławika pokazanego na wykresie w katalogu stwórz przybliżony model układu dla programu symulacyjnego. Szeregowy rezonans kondensatora Y jest poza interesującym zakresem. Porównaj wyniki pomiaru z symulacją. Duża rozbieżność oczywiście wynika z faktu że uzwojenie transformatora jest rozłożone a jego odpowiedź w zakresie radiowym jest bardzo złożona, a nie jest skupioną pojemnością jak w modelu. Przy zasilaniu uzwojenia pierwotnego generatorem obserwując oscyloskopem napięcie na uzwojeniu pierwotnym i wtórnym wyznacz częstotliwości ( tylko ) pierwszych rezonansów transformatora.
3.Stosując LISN można zakłócenia przewodzone oglądać oscyloskopem lub Analizatorem Widma - Spectrum Analyser. Użyty LISN własnego pomysłu ma ochronę wejść oscyloskopu i analizatora. Można zbadać wiele urządzeń. Na przykład zasilacz z komputerem Laptop. Sygnał z LISN do oscyloskopu przechodzi przez jeden z trzech wybieranych mało selektywnych filtrów o paśmie odpowiednio 0.15-1, 1-6 i 6-30 MHz. Należy zwrócić uwagę że oceniana oscyloskopem moc zakłóceń w tych pasmach jest w zdumiewająco dobrej zgodności z pomiarem SA.
Uwaga – Niedopuszczalne jest zasilanie z gniazda sieciowego bez kołka uziemiającego !
Fajnie tu u Pana. Muszę częściej tu zaglądać. Najlepiej 3 x dziennie.
OdpowiedzUsuńZastosowanie hydrauliki siłowej w przemyśle umożliwia realizację skomplikowanych procesów technologicznych. Systemy te są wykorzystywane do napędu maszyn, podnoszenia ciężkich ładunków oraz precyzyjnego pozycjonowania elementów. Ważne jest, aby wszystkie komponenty systemu działały w pełnej harmonii, co wymaga regularnych przeglądów i konserwacji. Osoby zainteresowane tymi zagadnieniami mogą znaleźć więcej szczegółów na stronie: http://hydro-dex.com/.
OdpowiedzUsuń